XiaoMi-AI文件搜索系统
World File Search Systemtoggle
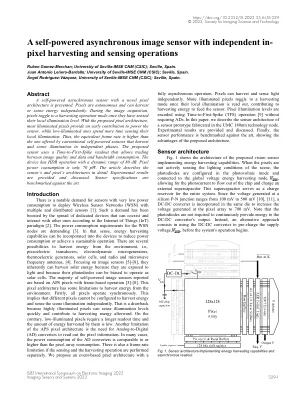
具有独立输入的自供电异步图像传感器
本文介绍了一种具有新颖像素结构的自供电异步传感器。像素是自主的,可以独立收集或感应能量。在图像采集过程中,一旦像素感应到其局部照明水平,它们就会切换到收集操作模式。使用所提出的像素架构,大多数发光像素都会为传感器提供早期供电,而低照度像素则会花费更多时间感应其局部照明。因此,等效帧速率高于传统自供电传感器提供的帧速率,后者在独立阶段收集和感应照明。所提出的传感器使用首次尖峰时间读数,允许在图像质量和数据与带宽消耗之间进行权衡。该设备具有动态范围为 80 dB 的 HDR 操作。像素功耗仅为 70 pW。本文详细介绍了传感器和像素的架构。提供并讨论了实验结果。传感器规格与现有技术进行了对比。
MicroLogix™ 1500 可编程控制器 - RS Components
1 硬件概述 硬件概述。.......................。。。。。。。。。。。。。。。。。。。。。。。。.....1-1 组件描述 ................。。。。。。。。。。。。。。。。。。。。。。。。.......1-2 通信选项 ...............。。。。。。。。。。。。。。。。。。。。。。。。........1-5 2 安装您的控制器机构认证 .............。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-1 遵守欧盟指令。..... div>............。 。 。 。 。 。 。 . . . . . . div> . . . . . . 2-2 一般注意事项 . . . . . . < /div> . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . . . . . . . . 2-3 安全注意事项 . . . < /div> . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . . . . . . . . . . . . 2-4 电源考虑 . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。。。。。。。。...... div>......2-2 一般注意事项 ...... < /div>.....。。。。。。。。。。。。。。。。。。。。。。。。...... div>.........2-3 安全注意事项 ... < /div>.....。。。。。。。。。。。。。。。。。。。。。。。。...... div>............. 2-4 电源考虑 . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。.2-4 电源考虑 ....。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。...... div>..2-6 防止过热 ...。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . 2-8 主控继电器。 . . 。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . . . . . . 2-8 基座安装尺寸 . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . 2-13 控制器间距。 . . . 。 。 。。。。。。。。。.....。。。。。。。。。。。。。。。。。。。。。。。。...... div>..2-8 主控继电器。..。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . . . . . . 2-8 基座安装尺寸 . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . 2-13 控制器间距。 . . . 。 。 。。。。。。。。。.....。。。。。。。。。。。。。。。。。。。。。。。。...... div>.......2-8 基座安装尺寸 ....。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。...... div>.2-13 控制器间距。...。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-13 安装控制器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-14 安装控制器组件。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-18 3 连接控制器电线要求。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.........3-1 使用浪涌抑制器。............。。。。。。。。。。。。。。。。。。。。。。。。..........3-4 将控制器接地。...........。。。。。。。。。。。。。。。。。。。。。。。。............3-7 接线图 ............。。。。。。。。。。。。。。。。。。。。。。。。....................3-8 吸电和拉电电路。..。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。3-8 控制器 I/O 接线。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。3-14 4 连接系统默认通讯配置。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4-1 使用通信切换按钮。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4-2 连接到 RS-232 端口。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.............4-3 连接到 DH485 网络 ...........。。。。。。。。。。。。。。。。。。。。。。。。........4-8 连接 AIC+。.............。。。。。。。。。。。。。。。。。。。。。。。。............4-12 DeviceNet 通信 ............。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4-20
Illumina单细胞3'RNA准备训练包
还建议在用户指南中查看“ PipSeq Dry Bath操作”指令,以了解如何在不同的干浴协议之间进行更改以及如何为每个程序手动设置盖子模式(请参阅用户指南第3.2.3节)。选择程序时不会自动设置盖模式。您必须选择正确的程序,然后选择“编辑”,然后使用编辑屏幕底部的“ Lidmode”按钮,以切换到正确的盖子模式设置。“ +5.0”设置用于细胞裂解(程序A),“ 105”设置用于核裂解(程序B)和cDNA合成(程序C)。选择“保存/返回”以返回操作屏幕。另外,请确保将正确的管块安装在干浴中以用于使用的套件(T2/T10的0.5 ml管块,T20的1.5 ml管块,T100的5 ml管块)。
可逆的非易失性电子切换在近房间...
非挥发相变的内存设备利用局部加热来在具有不同电性能的晶体和无定形状态之间切换。扩展这种切换到两个拓扑上不同的阶段需要受控的非易失性切换在两个具有不同对称性的晶体相之间。在这里,我们报告了在两个稳定且密切相关的晶体结构之间的可逆和非挥发性切换的观察,并具有非常不同的电子结构,在近室温的范德华(Van der waals)中,van der waals feromagnet fe 5-Δgete 2。我们表明,通过Fe位置空缺的顺序和无序,可以通过两阶段的晶体对称性来实现开关,这可以通过热退火和淬火方法来控制。这两个阶段是由于在位置排序相中保留的全局反转对称性而存在拓扑结节线的区别,这是由量子破坏性干扰在双位晶格上引起的,而在站点排序相位的反转对称性。
在电池式操作中驱动器 - iot-iot-device。 ...
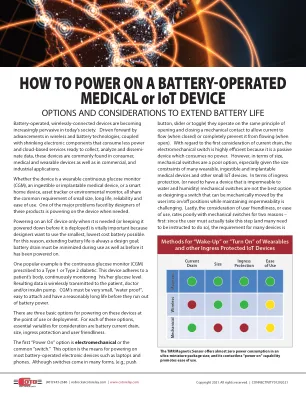
按钮,滑块或切换)它们以相同的打开和关闭机械触点的原则进行操作,以允许电流到流(关闭时)或完全阻止其流动(打开时)。关于当前排水的第一个考虑,机电开关非常有效,因为它是一种无动力的被动装置。然而,就尺寸而言,机械开关是一个差的选择,尤其是考虑到许多可穿戴,可耐用和可植入的医疗设备以及其他小型物联网设备的尺寸限制。就入口保护而言(或需要具有不渗透水和湿度的设备)机械开关并不是最佳选择,因为设计开关可以机械地将其机械移动到ON/OE效率的同时,同时保持不理性是有挑战性的。最后,考虑用户友好性或易用性,与机械开关相差很差,原因有两个 - 第一:由于用户必须实际采取此步骤(并且需要指示许多设备的要求),因此许多设备的要求是

2015 财年至 2022 财年军事自由落体事故
事件描述和疑似原因: 跳伞员当时正在执行空中作战教练的职责,他的学生在 5000 英尺高度展开后,他与学生分离并在 3700 英尺高度展开。跳伞员称他遇到了一个硬开合,伞绳扭曲,因此正在急右转弯。消除扭曲后,他仍然处于急右转弯状态。现在大约在 2700 英尺的高度,他查看了伞绳和座舱盖。在发现没有明显问题后,他拉动后立管以稳定并停止转弯。在大约 2100 英尺的高度,他看到两个伞绳套仍然收起,伞绳没有断裂。松开立管后,他立即回到急右转弯。他考虑过松开伞绳套,但高度低于 2000 英尺,因此决定执行切断程序。EP 期间没有遇到问题。安全着陆。 检查主舱盖后发现,两个刹车仍然收起,但左刹车开关没有正确穿过控制线猫眼。

C 系统 - KoreaScience
仿真是核电站基于 PLC 的数字 I&C 系统的 FBD 程序广泛使用的功能验证方法。然而,在没有任何明确的评估指标的情况下,很难评估模拟的彻底性(即有效性或质量)。本文提出了两套 FBD 模拟的结构覆盖充分性标准,即切换覆盖率和修改后的条件/决策覆盖率,它们可以评估 FBD 程序模拟场景的彻底性,这是国际功能安全标准所建议的。我们开发了两个支持工具来生成大量模拟场景并自动测量场景的覆盖率。我们对五个 FBD 程序进行的实验结果表明,这些指标和工具可以帮助软件工程师评估彻底性并定量改进模拟场景。© 2020 韩国核学会,由 Elsevier Korea LLC 出版。这是一篇根据 CC BY-NC-ND 许可协议 ( http://creativecommons.org/licenses/by-nc-nd/4.0/ ) 开放获取的文章。
诊断指南。 - Wilbur Curtis
2.在连接到设备之前,将所有水管和滤芯中的空气排入桶中以清除空气。(注意:更换滤芯时也应清除空气。)3.将设备连接到适当的电源电路。有关电压和安培额定值,请参阅序列号板。4.打开设备后面的拨动开关(待机/开启)。加热罐将开始注水。当水箱中的水位升至正确容量时,加热元件将自动通电。使用我们的电子系统,启动时不会因水箱空而导致元件烧坏。5.加热罐需要 10 到 30 分钟(具体取决于型号)才能达到“准备冲泡”指示器指示的设定温度。6.首次冲泡前,通过热水龙头分配约 12 盎司热水。7.每侧至少运行 12 盎司的冲泡循环,以清除注水后可能滞留在水管中的任何空气。
iBT235 在线 IBv2.ai
1.按住设备背面的时间设置按钮 2 秒钟,直到时钟显示闪烁并发出哔声。2.按 – 或 + 按钮将时钟调整为当前时间(按住可快速设置)。确保设置正确的 AM/PM 时间。PM 指示器出现在显示屏左侧;没有 AM 指示器。3.要在标准 12 小时制和 24 小时制(“军用”)时间显示之间切换时钟显示,请在时间设置期间显示屏闪烁时按下闹钟或闹钟按钮。4.按下并释放时间设置按钮以确认当前时间设置。年份将在显示屏上闪烁。按下 – 或 + 按钮设置正确的年份。5.按下并释放时间设置按钮以确认当前年份设置。日期将在显示屏上闪烁。按下 – 或 + 按钮以设置正确的月份和日期(按住可快速调整)。6.按下并释放时间设置按钮以确认当前日期设置。将发出 2 声哔声,表示时间设置模式已完成。

iBTW41 在线 IB draftv3.ai
1. 按住位于设备背面的时间设置按钮 2 秒钟,直到时钟显示屏闪烁并发出哔声。 2. 按 – 或 + 按钮将时钟调整为当前时间(按住可快速设置)。确保设置正确的 AM/PM 时间。PM 指示器出现在显示屏左侧;没有 AM 指示器。 3. 要在标准 12 小时制和 24 小时(“军用”)时间显示之间切换时钟显示,请在时间设置期间显示屏闪烁时按下闹钟或闹钟按钮。 4. 按下并释放时间设置按钮以确认当前时间设置。年份将在显示屏上闪烁。按 – 或 + 按钮设置正确的年份。 5. 按下并释放时间设置按钮以确认当前年份设置。月份将在显示屏上闪烁。按 – 或 + 按钮设置正确的月份。 6. 按下并释放时间设置按钮以确认当前月份设置。显示屏上会闪烁日期。按 – 或 + 按钮设置正确的日期。7. 按下并释放时间设置按钮以确认设置。将发出 2 声哔声,表示时间设置模式已完成。