XiaoMi-AI文件搜索系统
World File Search Systemtracking

基于眼动的人 - 计算机...
1,2,3,4 Mahaguru技术研究所,Kattachira摘要:人类计算机互动(HCI)重点关注人员与计算机之间的界面和互动。 HCI的主要目标是设计一个使人们以新颖方式与计算机互动的环境。 人们用来互动的最重要方法之一是眼动和眼睛眨眼,尤其是对于身体残疾的人。 本文基于眼睛眨眼和面部运动提出了一种屏幕上的计算机交互方法。 这两个主要组成部分是图像处理,以检测眼睛,面部运动和闪烁的眼睛。 面部图像由计算机的相机捕获,然后用于确定眼睛位置和尺寸。 这是根据著名的“ 68点”和面部检测方法的面部网格系统完成的。 在此系统中使用眼睛眨眼来输入类似于用户按下键盘上的“ Enter”按钮的字符,并且使用面部运动来移动光标类似于使用鼠标的使用。1,2,3,4 Mahaguru技术研究所,Kattachira摘要:人类计算机互动(HCI)重点关注人员与计算机之间的界面和互动。HCI的主要目标是设计一个使人们以新颖方式与计算机互动的环境。人们用来互动的最重要方法之一是眼动和眼睛眨眼,尤其是对于身体残疾的人。本文基于眼睛眨眼和面部运动提出了一种屏幕上的计算机交互方法。这两个主要组成部分是图像处理,以检测眼睛,面部运动和闪烁的眼睛。面部图像由计算机的相机捕获,然后用于确定眼睛位置和尺寸。这是根据著名的“ 68点”和面部检测方法的面部网格系统完成的。在此系统中使用眼睛眨眼来输入类似于用户按下键盘上的“ Enter”按钮的字符,并且使用面部运动来移动光标类似于使用鼠标的使用。
追踪可持续发展目标7:能源进展报告
第三方内容 — 世界银行不一定拥有作品中包含的每个内容组件。因此,世界银行不保证作品中包含的任何第三方拥有的单个组件或部分的使用不会侵犯第三方的权利。由此类侵权导致的索赔风险完全由您承担。如果您希望重新使用作品的某个组件,您有责任确定是否需要获得许可才能重新使用,并获得版权所有者的许可。组件的示例包括但不限于章节、表格、图形或图像。
中西部可再生能源跟踪系统
第 1 部分:简介 ................................................................................................................................ 6
能源进展报告 - 追踪可持续发展目标 7
第三方内容 — 世界银行不一定拥有作品中包含的每个内容组件。因此,世界银行不保证作品中包含的任何第三方拥有的单个组件或部分的使用不会侵犯第三方的权利。由此类侵权导致的索赔风险完全由您承担。如果您希望重新使用作品的某个组件,您有责任确定是否需要获得许可才能重新使用,并获得版权所有者的许可。组件的示例包括但不限于章节、表格、图形或图像。

跟踪北欧清洁能量进度
GHG Greenhouse gas: CO2, CH4, N2O, and fluorinated-gases (F-gases) H 2 Hydrogen IEA The International Energy Agency LULUCF Land Use, Land-Use Change and Forestry NCES Nordic Clean Energy Scenarios PtX Power-to-X RD&D Research, Development and Demonstration RE/RES/VRES Renewable Energy/Renewable Energy Sources VRES Variable renewable energy sources such as wind and solar
能源进度报告 - 跟踪SDG 7
通用电力的通用。可持续发展目标7.1是对可靠,可靠,可持续和现代能源服务的普遍访问; 7.1.1专注于获得电力。最新的电力访问进度是2030年的前景。虽然2019年有7.59亿人的份额在2019年长达90%,但仍缺乏访问权限。一半生活在脆弱和冲突的环境中,在农村地区84%。IEA的宣称的政策方案项目在2030年,大约6.6亿人仍然无法获得电力。必须在2030年之前连接约9.4亿人,才能达到普遍的访问。COVID-19危机威胁着世界某些地区的进步。在撒哈拉以南非洲地区,无法获得电力的人数很可能在2020年增加。这意味着从现在到2030年之间的访问率必须超过三倍。仅在撒哈拉以南非洲,这意味着每年至2030年将约8500万人连接。

使用IoT和...
摘要 - 本文涉及通过监视评估车辆当前健康状况的内部参数来开发用于检测车辆状况的嵌入式系统。在用户需要时,该项目正在开发该项目的车载嵌入式系统,以生成车辆健康报告(VHR)。它可以预测未来的错误,从而使驾驶员可以不中断旅行并避免发生事故。结果,它警告驾驶员潜在的错误,并帮助他安全开车。生成健康报告所需的数据由车辆内部各种系统的参数值(内置传感器的输出)组成。我们的框架基于Arduino和IoT阶段,这些阶段用于分开各种参数,例如电机变暖和燃油管阻塞,以进行安全且谨慎的驾驶。数据将发送到IoT,在该物联网中,车辆制造商可以通过分布式计算和通过Android应用程序对其进行检查。设备单元由Arduino,Wi-Fi模块,基于Android的设备以及唯一的参数检查传感器模块组成。ESP8266 WiFi模块是具有集成的TCP/IP协议堆栈的独立SOC,可以使任何微控制器访问您的WiFi网络,该网络可用于当前一代汽车。
跟踪生物多样性的经济工具和金融
“基于激励的”工具)提供了保护和可持续使用生物多样性的激励措施。它们包括税收,费用,环境动机的补贴,可交易许可计划,生态系统服务的付款以及生物多样性偏移。这些激励措施为生产者和消费者提供了价格信号,以更环保的方式行事。从经济角度来看,生物多样性阳性激励措施是解决与使用生物多样性及其生态系统服务相关的市场失败的关键。与更传统的监管(命令和控制)工具相比,经济工具提供了连续的激励措施,以更具成本效益的方式帮助实现给定的环境目标。
跟踪MENA的气候政策不确定性
在一个时代,反对气候变化的呼吁在整个大洲的气候变化呼应时,世界发现自己处于关键点。气候变化的明确迹象 - 提高海平面,不可预测的天气现象以及改变农业景观的迹象,表明了一项多方面的挑战,具有深远的影响。这些现象ENA超越了纯粹的环境范围来触及社会经济领域,这引起了警报铃,我表明迫切需要对全球响应产生凝聚力。1数十亿美元,充满了这些转变的后果,包括增加的粮食稀缺,强迫移民和危险的生计,地球的健康和人类繁荣的相互依存从未如此明显。这些危机要求采取一种强大的统一方法来减轻气候变化的不利影响并维护我们全球社区的福音。
gstar:高斯表面跟踪和重建
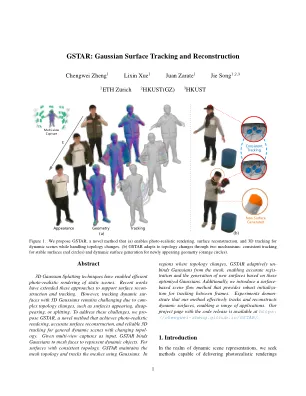
从任意观点以及适应不断变化的拓扑结构的表面重构。涉及人类或机器人相互作用与物体的场景需要动态适应分裂,合并或变形的表面。热热,下游应用,例如视觉效果和无标记运动捕获,从不依赖模板的情况下跟踪持久区域的能力显着。因此,方法必须有效地处理这些拓扑更改,以确保高质量的渲染和准确的重建,同时还要维护对现有表面的同意跟踪。经典方法主要依赖于网格和tex曲线图,这些图提供了合理的外观,但重大取决于网格分辨率。他们常常无法准确地确定细节和观察依赖性效果。al-尽管这些网格表示可以进行一定程度的跟踪,但它们努力处理重大的拓扑变化,需要新的关键帧以适应ma-jor变换。神经辐射场的出现(NERF)[28]在静态[1,46]和dy-namic场景[17,30]的外观和新型综合方面有了显着改善。使用Marting Cubes [37,44]可以从隐式签名的距离功能(SDF)得出表面,但除非使用了不足的模板,否则它们缺乏一致的跟踪。最近,出现了3D高斯脱落(3DGS)[20],具有明确的纹理代表,在外观上与NERF竞争,同时实现了更有效的效果。这些高斯人与网格面一起移动,以表示移动和变形的对象。其明确表示有助于跟踪,并为此开发了几种技术[26,50]。然而,准确的动态表面重建仍然是一个挑战,并且在现有表面的跟踪与引入新的表面保持平衡被证明很困难。为了应对这些挑战,我们提出了GSTAR,该方法能够重建光真逼真的外观和准确的表面几何形状,并随着拓扑变化而保持一致的跟踪。GSTAR利用多视图盖,并将网眼与绑定的高斯人结合在一起,与高斯表面相结合。当新的表面变得可见时,新的高斯人会产生,并且网格拓扑更新。适应性网格提供了时间一致,准确的几何形状,而高斯人则带来了逼真的外观。这个问题很困难,因为总会有一个折扣。可以通过固定的托架或模板[24,50]更轻松地跟踪的方法倾向于在新的姿势或变形下降低外观和几何形状的质量。相反,过度拟合静态场景的方法[8,14,16]缺乏时间一致性或错过新的框架详细信息。GSTAR通过尽可能多地跟踪面孔来解决这一权衡