XiaoMi-AI文件搜索系统
World File Search Systemuno

2018 年注册文件 - 法航荷航
本注册文件是法语参考文件的非正式翻译,根据 AMF 一般规定第 212-13 条,该文件于 2019 年 4 月 8 日星期一提交给法国金融市场管理局。此非正式翻译由法航荷航集团编写,旨在为英语读者提供信息和方便,尚未经过 AMF 审核/注册。我们无法保证此翻译的准确性或完整性,也不对其中可能包含的任何错误陈述或遗漏承担任何责任。如果附有 AMF 批准的发行备忘录,法语参考文件可用于金融交易。如果此非正式翻译与法语参考文件之间存在任何歧义或差异,则以法语版本为准。

使用Arduino和...
摘要 - 整个地板清洁机器人分为几个部分,即由超声传感器,电动机屏蔽L298,Arduino Uno Microcontroller,Servo和DC电机组成。当Arduino Uno微控制器作为距离检测器和DC电动机作为机器人驱动器处理超声波电机时,此工具可以工作,然后DC电机由电动机屏蔽L298驱动。当超声波传感器检测到其前面的障碍物时,机器人将自动寻找不是地板清洁机器人障碍的方向。已经确定了传感器上的距离值,即,当超声传感器读取的距离低于15 cm时。测试超声传感器距离值的结果发现了发生的不同条件。在> 15厘米的距离内,获得了用于道路地板清洁的原型清洁机器人的状况,而距离<15 cm的距离,街道地板清洁机器人原型的状态已停止。


使用IR传感器的基于Arduino的自动驾驶汽车
2,3,4,5部门,Maharaja技术研究所Thandavapura,Mysore摘要 - 该项目着重于使用Arduino Uno板和一系列组件的开发自动驾驶汽车的开发,包括HC-05蓝牙模块,包括L298N运动驱动程序,L298N运动驱动程序,IR传感器,2x3.7V Batteries,2x3.7V Batteries和Neo 6m和Neo 6m gps 6m gps Module。 该项目的基本目标是实现自主导航功能,将泳道和障碍物检测的红外传感器与基于目的地的旅行的GPS坐标结合在一起。 集成的软件和硬件体系结构有助于自动和手动模式,该系统能够在检测障碍物时过渡到手动控制。 通过设计的代码结构,该汽车可以精确地遵循指定的坐标,以达到预定义的目的地,然后返回到源。 利用IR传感器用于车道和障碍物检测,基于坐标导航的GPS模块的集成以及自动和手动模式之间的无缝过渡,使该项目成为自主机器人导航的值得注意的证明。 关键字 - Arduino Uno,HC-05蓝牙型号,L298N电机驱动器,IR传感器,NEO 6M GPS模块。,Maharaja技术研究所Thandavapura,Mysore摘要 - 该项目着重于使用Arduino Uno板和一系列组件的开发自动驾驶汽车的开发,包括HC-05蓝牙模块,包括L298N运动驱动程序,L298N运动驱动程序,IR传感器,2x3.7V Batteries,2x3.7V Batteries和Neo 6m和Neo 6m gps 6m gps Module。该项目的基本目标是实现自主导航功能,将泳道和障碍物检测的红外传感器与基于目的地的旅行的GPS坐标结合在一起。集成的软件和硬件体系结构有助于自动和手动模式,该系统能够在检测障碍物时过渡到手动控制。通过设计的代码结构,该汽车可以精确地遵循指定的坐标,以达到预定义的目的地,然后返回到源。利用IR传感器用于车道和障碍物检测,基于坐标导航的GPS模块的集成以及自动和手动模式之间的无缝过渡,使该项目成为自主机器人导航的值得注意的证明。关键字 - Arduino Uno,HC-05蓝牙型号,L298N电机驱动器,IR传感器,NEO 6M GPS模块。
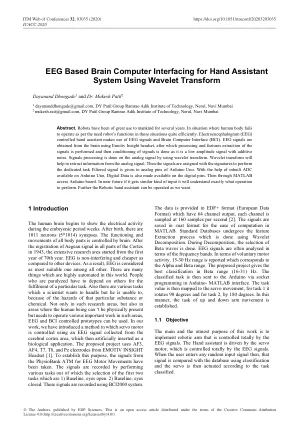
基于脑电图的脑机接口用于使用小波变换的手部辅助系统
摘要。多年来,机器人一直为人类带来巨大的用途。在人体无法按需求运作的情况下,机器人的功能在这些情况下非常有效。脑电图 (EEG) 控制的手部助手利用 EEG 信号和脑机接口 (BCI)。使用 Emotiv Insight 耳机从大脑获取 EEG 信号,然后对信号进行处理和特征提取,然后对信号进行调节,因为它是具有加性噪声的低幅度信号。使用小波变换对模拟信号进行信号处理。小波变换将有助于从模拟信号中提取信息。然后为信号分配签名以执行专用任务。滤波信号被提供给 Arduino Uno 的模拟引脚。借助 Arduino Uno 上内置的 ADC,数字数据也可在数字引脚上获得。然后通过 MATLAB 访问 Arduino 板。在不久的将来,如果它得到类似的输入,它将准确理解要执行什么操作。此外,机器人手部助手可以根据我们的需要进行操作。

太阳能,蓝牙控制的种子计量机构的设计和开发
抽象是一种太阳能驱动的,蓝牙控制的种子计量机制,以使机器可持续且易于使用。使用蓝牙设备(如智能手机)降低了机器的成本,并具有很高的产量。它取代了燃料动力的种子计量机制,该机制有很多环境问题和人工成本。在开发的机器中,该机器由存储在电池中的太阳能提供动力。同时,机器的电动机正在使用此电源旋转,并且指示由智能手机等蓝牙设备控制。对于机器的行驶,我们使用了两个直流电动机和方向控制。前轮连接到轴承,而后轮运动高或旋转高的地方,前轮旋转该侧。对于计量机构,我们使用了金属齿轮伺服电动机360,该伺服电动机360使用蓝牙模块由Arduino Uno控制。鹰嘴豆使用该机器进行计量,并给出83%的现场效率,0.48和0.40 HAC/HR理论和实际场容量。关键字:太阳能,蓝牙模块,现场效率arduino uno



基于IOT的智能夜间巡逻机器人
使用Arduino Uno,相机模块,声音传感器,超声传感器,电动机驱动器,电动机,Nodemcu和蜂鸣器,本文提出了基于IoT的智能夜间巡逻机器人的实现。建议的机器人旨在自主巡逻指定区域,并使用摄像头模块捕获该区域的图像和视频。超声传感器用于检测障碍物和防止碰撞,而声音传感器则用于检测异常声音并提醒用户。包括蜂鸣器以提供可听见的警报,以防巡逻区域发生任何重大干扰。机器人旨在使用由Arduino Uno操作的电机驱动器和电动机四处移动和更改方向。NodeMCU提供了Internet连接,从而启用远程监视和控制。拟议的系统可用于各种应用程序,例如监视和安全性,并有可能提高夜间巡逻操作的效率和有效性。所提出的系统以低成本开发,使更广泛的用户可以使用。已经测试了所提出的系统的实施,结果表明该系统在检测和响应环境刺激方面具有效率有效。使用基于Web的接口控制系统,用户可以远程监视和控制系统。