XiaoMi-AI文件搜索系统
World File Search Systemvd
ERC合并赠款面板2023
约翰内斯·安格勒勒(面板椅)是宠物迈克尔·沃尔德曼Papaioannou Maxim Romanov Henk Henk P.RūtaRūtastonevičiūt的Slections-CelticleKelmickienėCarinaH. Van Danel-Oskam Helena Wulff
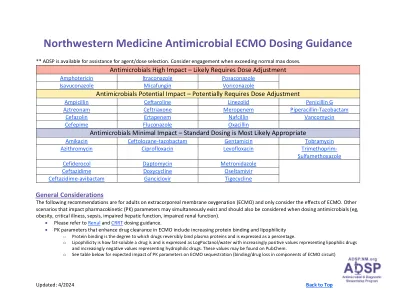
西北医学抗菌ECMO剂量指南
如果考虑延长的LD持续时间,请在3天后使用TDM标准MD提早建议使用新的开始ECMO,电路交换,并且ECMO停止缩写:PK,药代动力学; log P,辛醇/水系数(从Pubchem/Chemspider检索); VD,体积分布; CMAX,最大浓度; LD,加载剂量;医学博士,维护剂量; TDM,治疗药物监测; MRSA,甲氧西林金黄色葡萄球菌; MIC,最小抑制浓度 *与Isavuconazole有效性/毒性相关的确定治疗范围尚未在Secure(一项III期临床试验)中建立。在危重患者中提倡的谷水平> 1-2mg/l接受ECMO支持的侵袭性真菌感染的治疗,以获得与安全试验相似的平均暴露,该试验证明了针对侵入性霉菌感染的临床疗效。TDM可能有助于比较前/ECMO后水平以确定ECMO对剂量升级需求的影响35参考
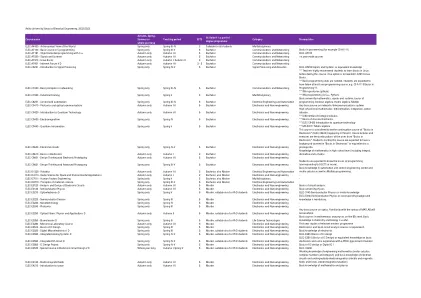
阿尔托大学电气工程学院,2022-2023
ELEC-A4930 - 天文世界观 仅限春季 春季 III-IV 3 适合所有学生 多学科 - ELEC-A7100 - C 语言编程基础课程 仅限春季 春季 III-V 5 通信与网络学士 编程基础(例如 CS-A1111) ELEC-A7151 - 使用 C++ 进行面向对象编程 仅限秋季 秋季 I-II 5 通信与网络学士 ELEC-A7100 ELEC-A7200 - 信号与系统 仅限秋季 秋季 I-II 5 通信与网络学士 一年级数学课程 ELEC-A7310 - Linux 基础知识 仅限秋季 秋季 I、秋季 II 3 通信与网络学士 - ELEC-A7901 - 互联网论坛 VD 仅限秋季 秋季 I-II 3 - 5 通信与网络学士 - ELEC-C5231 - 信号处理简介 仅限春季 春季 IV-V 5 信号处理与声学 ELEC-A7200 信号与系统或同等知识

Solidtron™ 固态启动器点火开关,TO-247 (5L)
表 1 最大额定值 符号 值 单位 断态重复峰值电压 V DRM 1500 V 反向重复峰值电压 V RRM -10 V 断态电压变化率抗扰度(VD =1500V) dv/dt 1000 V/µSec 峰值非重复浪涌电流(1/2 正弦波脉冲持续时间 =/<300nSec) I TSM 4000 A 峰值重复浪涌电流(1/2 正弦波脉冲持续时间 =/<300nSec) I TRM 3500 A 电流变化率 dI/dt 100 kA/µSec 临界电容放电事件积分(欠阻尼 LCR 电路) I 2 t CRITICAL TBD A 2 秒重复电容放电事件积分(欠阻尼 LCR 电路) I 2 t REPETITIVE 2A 2秒连续栅极-阴极反向电压V GKS -9 V正向峰值栅极电流(10

10评论文章 - 糖尿病患者的代谢特征-pdf.cdr
目的:研究糖尿病前期患者的代谢特征,并将其与对照组的代谢特征进行比较。 div>MATERIAL AND METHODS: A total of 105 people, 57 with prediabets (Prediab), 27 women and 30 men, and 48 people without prediab, 27 women and 21 men, to whom the anthropometric measures were taken and in the blood were measured basal glucose (G0), at 60 and 120 minutes postprandial, basal insulin (i0) and postprandial (IPP), Total cholesterol (CT),通过常规方法,HDL胆固醇(HDL),甘油三酸酯(TG),转氨酶(TGO,TGP),维生素D(VD),副6种(PTH)通过常规方法;计算了HOMA指数,VLDL,LDL和NOHDL级分。 div>结论:患有预性的人的代谢风险要比没有预贝质更大。 div>
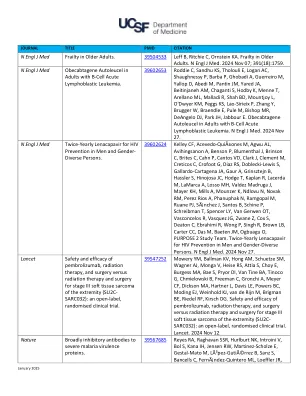
n Engl J Med Flailty在老年人中。
39602624 Kelley CF, Agwu AL, Avishingsanon A, Benson P, Blumental J, Brites C, Brites C, Cahn P, VD Singes, Clement M, Creticos C, Creticus G, Cross District, S. Gaur A, Gaur A, Hassler S, Hinojosa JC, Hodge T, Caplar R, Lacera M, Later A, Losso MH, Madruga Valley J,Mayer KH,Mills A. Ruane PJ,Systems B,Santos B,Schine P,Schreibman T,Ly Spencer,van Gerwen OT,JG,Zwane Z,Cox S,Cox S,Deathon C,Ebrahimi C,Ebrahimi R,Wong P,Wong P,Singh R,Singh R,Singh R,Brown LB,Carter CC CC。团队学习。每年两次n Engel J Med。2024年11月27日。
HCM手册2024-2025
t是一个令人兴奋而鼓舞人心的时刻,成为sduw ri wkh joreo khdowk dqgʛwqhvv行业,因为它在地理上发展并越来越多地随着福祉和医疗保健领域而越来越多。在充满挑战的经济状况下,lwȷvd yrwh rifrqʛghqfhwr khdu frqvlvwhqw报告说,人们优先考虑其在健康方面的支出,这使该行业恢复了流行前的水平。麦肯锡的最新健康调查(第92页)显示,现在有82%的消费者将健康视为重中之重。在英国,这是73%,中国为87%。健康俱乐部越来越成为社交活动的地方,成员重视社区和归属感。麦肯锡发现50%的体育家报告说,锻炼是他们个性不可或缺的一部分。令人鼓舞的是,看到行业变得更加广泛,并采用krolvwlf ylhz ri khdowk dqgʛwqhvv
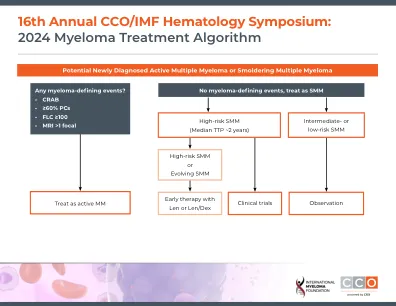
2024骨髓瘤治疗算法
ADC,抗体 - 药物结合; ASCT,自体干细胞移植; BCMA,B细胞成熟抗原; Cilta-Cel,Ciltacabtagene Autoleucel;螃蟹,钙升高,肾功能不全,贫血,骨异常;达拉(Dara),daratumumab; Dex,地塞米松; ERD,Elotuzumab/Lenalidomide/地塞米松; EMD,外疾病; EPD,Elotuzumab/Pomalidomide/地塞米松; FLC,自由轻链; IDE-CEL,IDECABTAGENE速度; IMID,免疫调节药物; IRD,IXAZOMIB/Lenalidomide/地塞米松; Isa,isatuximab; KCD,Carfilzomib/环磷酰胺/地塞米松; KD,Carfilzomib/地塞米松; KPD,carfilzomib/pomalidomide/地塞米松; KRD,Carfilzomib/Lenalidomide/地塞米松; Len,Lenalidomide; mAb,单克隆抗体; MM,多发性骨髓瘤; PC,浆细胞; PCL,浆细胞白血病; PD,Pomalidomide/地塞米松; PI,蛋白酶体抑制剂; RD,Lenalidomide/地塞米松; SMM,闷烧多发性骨髓瘤; TTP,进展的时间; VCD,硼替佐米/环磷酰胺/地塞米松; VD,Bortezomib/地塞米松; VDT-pace,硼替佐米/地塞米松/thalidomide/顺铂/阿霉素/环磷酰胺/依托泊苷; VRD,硼替佐米/列纳替米胺/地塞米松; VTD,硼替佐米/沙利度胺/地塞米松。

分布式与本地表示
Goldsmith, JA (1990)。自音段和韵律音系学。牛津:Blackwell。 Halle, M. (1983)。论区别性特征及其发音实现。自然语言与语言学理论 1:91-105。 Hulst, H. vd (1989)。音段结构的原子:成分、手势和依赖性。音系学 6:253-284。 Lombardi, L. (1994)。喉部特征和喉部中和。纽约:Garland。 Padgett, J. (1995)。特征几何中的限制。斯坦福:CSLI 出版物。 Sandler, W.,编辑 (1993)。音系学:手语音系学特刊。音系学 10:165-306。 Schane, SA (1984)。粒子音系学的基础。音系学年鉴 1:129–155。Walsh, DL (1997)。流音音系学。博士论文。马萨诸塞大学阿默斯特分校。Williamson, K. (1977)。辅音的多值特征。语言 53:843–871。

双引导脑扩散模型:从人类视觉刺激 fMRI 进行自然图像重建
摘要:从记录大脑活动的 fMRI 信号中重建视觉刺激是一项具有挑战性的任务,在神经科学和机器学习领域具有重要的研究价值。先前的研究倾向于强调重建刺激图像的像素级特征(轮廓、颜色等)或语义特征(对象类别),但通常这些属性不会一起重建。在这种情况下,我们介绍了一种新颖的三阶段视觉重建方法,称为双引导脑扩散模型 (DBDM)。首先,我们使用非常深的变分自动编码器 (VDVAE) 从 fMRI 数据中重建粗略图像,捕捉原始图像的底层细节。随后,使用引导语言图像预训练 (BLIP) 模型为每个图像提供语义注释。最后,利用多功能扩散 (VD) 模型的图像到图像生成管道从由视觉和语义信息引导的 fMRI 模式中恢复自然图像。实验结果表明,DBDM 在定性和定量比较方面均超越了以前的方法。特别是,DBDM 在重建原始图像的语义细节方面取得了最佳性能;Inception、CLIP 和 SwAV 距离分别为 0.611、0.225 和 0.405。这证实了我们模型的有效性及其推动视觉解码研究的潜力。