XiaoMi-AI文件搜索系统
World File Search Systemvehicles
电动和自动驾驶汽车研讨会
自动驾驶汽车的路径规划和跟踪策略 电池系统的 BMS 开发 车辆动力学和控制:从实验室到实践 人与机器——未来车辆动力学评估的范式转变 用于 ADAS 开发的不同模拟器的集成 国家汽车测试轨道上的车辆测试解决方案 具有区域架构的集成底盘控制系统的端到端模拟设置 运营技术中的网络安全挑战

自动驾驶汽车:联合报告
第二阶段:授权 76 授权机构 77 为什么需要授权阶段? 77 支持第二阶段授权 78 授权结果:未获得授权的后果 79 不同特征会产生不同结果? 80 建议 9。 80 授权评估 80 安全案例 81 平等影响评估 82 数据 82 注册 ASDE 83 ASDE 要求 84 授权产生的 ASDE 职责 85
可重复使用的轨道转移飞行器
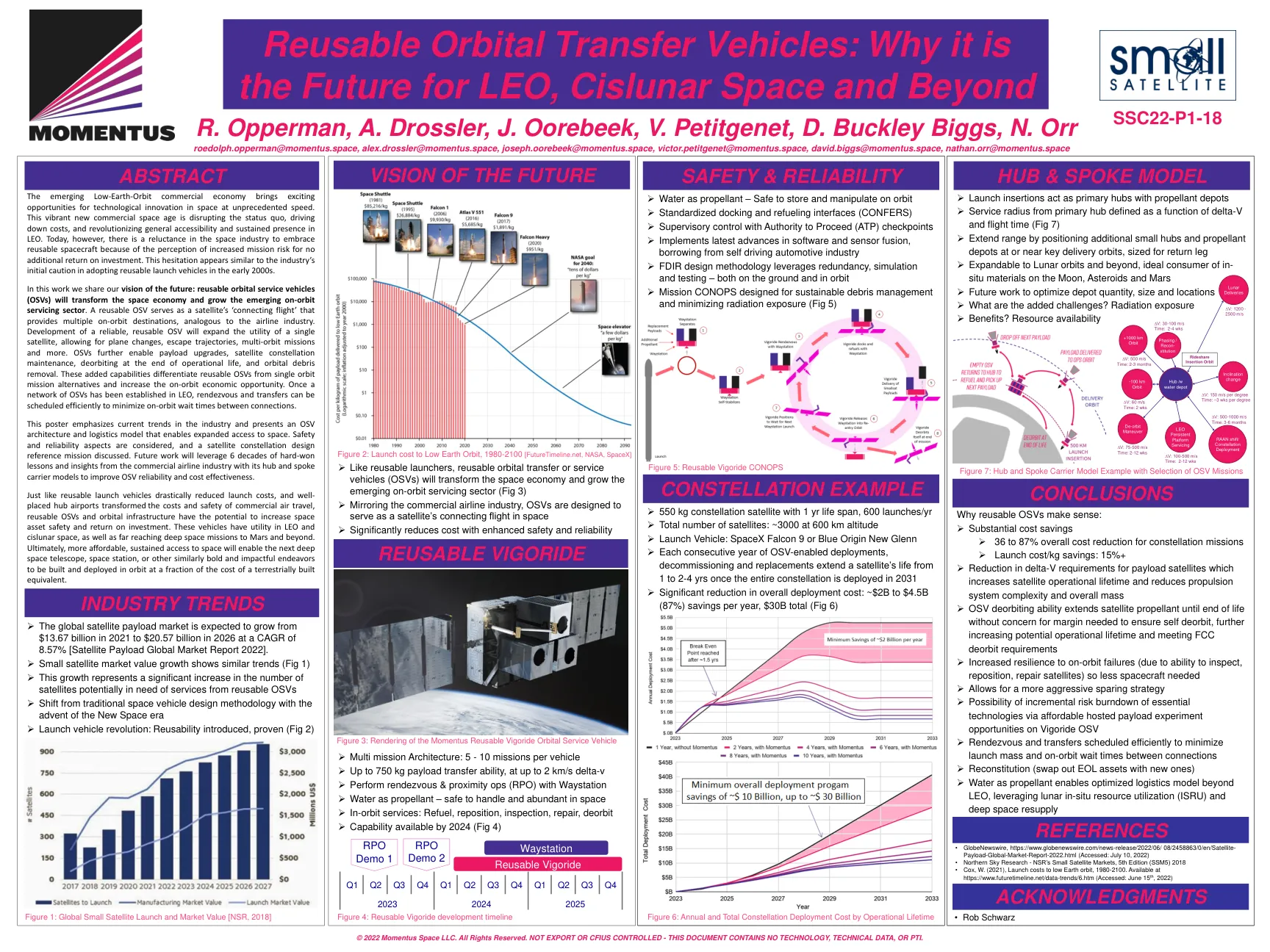
在这项工作中,我们分享了我们对未来的愿景:可重复使用的轨道服务飞行器(OSV)将改变太空经济并发展新兴的在轨服务行业。可重复使用的 OSV 充当卫星的“中转航班”,提供多个在轨目的地,类似于航空业。开发可靠的可重复使用的 OSV 将扩大单颗卫星的效用,允许更换平面、逃逸轨迹、多轨道任务等。OSV 进一步实现有效载荷升级、卫星星座维护、使用寿命结束时脱轨以及轨道碎片清除。这些附加功能将可重复使用的 OSV 与单轨道任务替代方案区分开来,并增加了在轨经济机会。一旦在低地球轨道建立了 OSV 网络,就可以有效地安排会合和转移,以最大限度地减少连接之间的在轨等待时间。
电池电动车辆的安全性
Sandvik出于安全原因选择了LFP的BEV。LFP的结构稳定性意味着,在细胞温度升高的情况下,它以其他化学的速度较低。如果电池电池热事件,由于LFP结构稳定性,能量,加热速率和最高温度大大低于其他锂离子化学。LFP化学在热事件中不会释放氧气。如果开火,这种化学反应会通过保持内在化并缓慢燃烧来大大减少爆炸性或大火的机会。

电动汽车:运输的未来
采用通过充电端口提供的传入的AC电力,并将其转换为直流电源,以充电牵引电池。它还与充电设备和监控电池特性(例如电压,电流,温度和充电状态)进行通信。6。电力电子控制器:
电动汽车融入微电网
化石能源的开发使人类的重点从农业转向工业化。工业化推动了两个多世纪以来文明的巨大进步。据预测,化石燃料产生的二氧化碳总量为2.2万亿吨[1]。近年来,以化石燃料为基础的能源利用模式导致了严重的碳排放和全球变暖。全球知名环保活动家瑞典少女格蕾塔·桑伯格在2020年达沃斯论坛上警告称,“立刻停止投资化石燃料,或者向你的孩子解释,为什么你没有保护他们免受你造成的气候混乱”[2]。过去十年,电力行业积极推进节能减排,但由于经济成本和负荷限制,弃风弃光现象依然存在[3–6]。在近来的政策激励下,碳中和、电动汽车和可再生能源的大力发展成为电力行业的必然趋势[7–9]。微电网是一种结合多种可再生能源的综合集成技术,可以提高风能和太阳能的利用率,减少碳排放[10,11]。风能和太阳能等可再生能源在发电过程中受不可预测的天气条件(如热浪、热带气旋、风暴)影响,具有不稳定性和间歇性。因此,很难持续稳定地应用这些宝贵的电能[12]。最终,为节约能源和实现碳中和做出贡献势在必行。自 1906 年以来,全球平均气温上升了 1.1 ◦ C [1]。为了有效应对全球变暖对人类社会的不利影响,2015 年联合国气候变化框架公约(UNFCCC)在法国巴黎举行。
印度空间研究组织的运载火箭
未来的火箭将是可重复使用的。只有一小部分火箭会被回收,大部分将重新进入地球大气层并着陆,就像一次任务一样。可重复使用的火箭将降低成本和能源,并减少由于大量发射而产生的太空垃圾问题。完全可重复使用的火箭仍有待开发,但部分可重复使用的发射系统 ISRO 还开发了一种可重复使用的火箭,称为 RLV-TD(可重复使用的发射 V),该火箭已于 2016 年成功试飞。