XiaoMi-AI文件搜索系统
World File Search Systemwheel
966H 轮式装载机规格,AEHQ5657-02
分离式冷却系统。许多竞争性装载机使用的冷却系统从侧面吸入空气,通过发动机舱,然后从机器后部排出。966H 冷却系统通过非金属护罩与发动机舱隔离。液压驱动的变速风扇从机器后部吸入清洁空气,然后从引擎盖的侧面和顶部排出。最终结果是最佳冷却效率、提高燃油效率、减少散热器堵塞和降低操作员噪音水平。

“语音控制轮椅” - ijrpr
老年人和数百万其他人一样,患有瘫痪和残疾,这使他们无法正常互动和满足生活需求。轮椅是增强残疾人行动能力的重要工具。计算机和通信技术的发展促进了满足残疾人需求的智能轮椅的出现。为了帮助残疾人完成日常工作,人们尝试应用现代计算机和通信技术来制造适合他们需要的智能轮椅。这些轮椅需要配备实时计算机控制单元和一组用于导航和避障任务的传感器。残疾人只需移动身体的一部分,使用声音或脑信号就可以控制轮椅。生成引导轮椅的命令的方法主要取决于患者的状况和残疾或瘫痪的程度。在我们之前的研究中,基于眼电图 (EOG) 信号的脑机接口被用于控制电动轮椅。在本文中,语音将用于引导轮椅。语音识别在计算机控制应用中的重要性日益凸显。语音识别技术可评估一个人的语音生物特征,例如频率、语调和语调。

2022—2026 年战略计划 - 车轮
我们相信,慈善机构和社区组织的志愿者和工作人员的时间、才华和精力是爱尔兰的宝贵资源。慈善机构和社区组织在满足社会需求方面具有独特的优势,既通过对新需求的创新响应,也通过长期参与特定需求和社区而获得的深刻见解。这些组织的专注、热情和使命感将社会资本添加到金融资本存量中,以帮助全面应对社会挑战。
924Gz 轮式装载机规格,AEHQ0546-03
产品链接选项。卡特彼勒的资产管理或设备管理系统称为产品链接,使经销商及其客户能够跟踪设备的运行时间和位置,在某些情况下还可以监控机器的健康状况。这个易于使用的系统通过基于互联网的经销商店面在机器和用户之间提供信息流。这些信息有助于通过及时的服务/维修和优化机器使用来降低运营成本。

自主轮装载器的世界建模
摘要:本文提出了一种学习世界模型的方法,用于在一堆土壤上执行自动装载动作。数据驱动的模型被学会了输出所得的桩状态,负载质量,时间和工作,并在给定输入的单个加载周期中工作,其中包括自动桶装控制器的初始桩形状和动作参数的高度图。在动态变化的环境中进行连续加载的长马计划被作为重复模型推断。由深神经网络组成的模型对来自3D多体动力学模拟的数据进行了培训,该数据对不同形状的砾石堆中的10,000多个随机加载动作进行了培训。预测负载性能的准确性和推理时间平均在1.2 ms中为95%和4.5 ms的97%。长马预测。
950H/962H 轮式装载机规格 AEHQ6844-00
知名 Cat 经销商支持 从帮助您选择合适的机器到提供专业支持,Cat 经销商在销售和服务方面提供最佳服务。通过定期油样分析 (S·O·S) 或综合客户支持协议等预防性维护计划管理成本。凭借一流的零件供应保持生产力。Cat 经销商甚至可以帮助您进行操作员培训,以帮助提高您的利润。当需要重建机器时,您的 Cat 经销商可以通过正品 Cat Reman 零件帮助您节省更多费用,这些零件具有与新零件相同的可靠性和保修,但动力传动系和液压零件的价格仅为新零件的 40% 到 70%。

980L 轮式装载机大型规格,AEHQ7895-02
Cat 生产测量 2.0(选配) • 将有效载荷称重功能带入驾驶室,使您能够在装载操作期间“随时随地”称重负载。• 集成 Cat 多功能触摸屏显示器带有图形用户界面,易于理解,不会给驾驶室增添杂乱感。• 简单的校准程序不需要特殊工具,并降低了操作复杂性。• 低举称重和倾卸功能可使卡车更快地装载到其最大容量。• VisionLink 通用后台界面为您提供装载机操作的快速摘要,包括有效载荷生产力和效率。• 可选的高级生产力订阅提供全面的可操作信息,帮助您管理和提高运营的生产力和盈利能力。
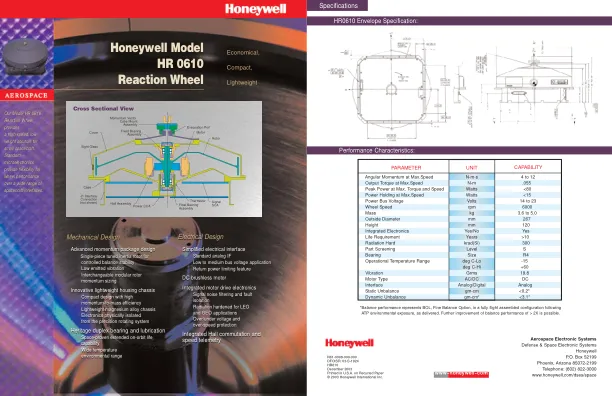
霍尼韦尔 HR 0610 型反作用轮
最大速度下的角动量 Nms 4 至 12 最大速度下的输出扭矩 Nm .055 最大扭矩和速度下的峰值功率 瓦 <80 最大速度下的功率保持 瓦 <15 电源总线电压 伏 14 至 23 轮毂速度 rpm 6000 质量 kg 3.6 至 5.0 外径 mm 267 高度 mm 120 集成电子元件 是/否 是 寿命要求 年 >10 辐射硬度 krad(Si) 300 零件筛选等级 S 轴承尺寸 R4 工作温度范围 摄氏度-低度 -15 摄氏度-高度 +60 振动 Grms 19.8 电机类型 交流/直流 直流 接口 模拟/数字 模拟 静态不平衡 gm-cm <0.2* 动态不平衡 gm-cm 2 <3.1*

Gaisce - 战略计划招标请求 - The Wheel
o 青年机会:2024 - 2028 年国家青年工作及相关服务战略 o 青年爱尔兰:2023 - 2028 年国家儿童和青年政策框架 o 2021 - 2027 年青年司法战略 o 2024 - 2026 年缓刑战略声明 o DEIS 计划 - 教育部战略声明,2023 - 2025 年 o 健康爱尔兰实施计划 o 2023 - 2027 年 ESD 到 2030:第二个国家可持续发展教育战略 o 2024 - 2026 年残疾人服务行动计划 o NCCA 战略计划 2022 - 2025 年 o 国家技能战略 - 继续教育和培训 (FET) 高等教育战略(2030 年高等教育国家战略)战略成果