XiaoMi-AI文件搜索系统
World File Search Systemwit

进口替代的政治经济学...
本文试图阐明埃及的进口替代工业化 (ISI)。该国经历了政治不稳定、社会变革和经济困难。在这方面,通过回顾其经济和政治历史可以更好地理解这些迹象。埃及在摆脱英国殖民地后,经历了许多战争。我们试图分析政治和经济制度及其在该国政治经济中的作用。政治、国际、经济和制度背景因政府和总统的不同而不同。这解释了经济表现的差异。有人认为,一些因素,如制度框架、政治和经济意识形态、社会联盟和国际金融机构,都受到 ISI 实施和成功的影响。

MDMA(摇头丸)对社会联系的影响
广泛地说,已经从黑暗的历史和过去的虐待中重新出现(有关评论,请参见Pentney,2001; Pollan,2018),产生数百种引人注目的可信发表研究。但是,这些研究尚未与社会心理学的主题融合。我在这里引起人们的注意,忽略了新的迷幻科学,可能会丢失什么。机智,精神活性的表述具有强大的潜力,可以通过阐明该领域研究的结构和过程来为社会精神研究提供信息。本文详细介绍了一种这种结构,感知的社会联系,被一种特定化合物((±)-3,4-甲基二甲甲基甲基苯丙胺(MDMA)所阐明,这是对一种新的Psy-Cy-Cy-Cy-CheDelic社会心理学科学的扩展研究。

非洲可再生能源发展:第一卷
该模型是一个代表能源生产部门和能源价格的网络,其基础是各种能源供应替代品的相对成本。所有现有的能源生产、转换、运输和需求活动以及具有使用潜力的活动都作为节点并称为过程纳入网络。网络链接代表过程之间的能量流。网络可用于预测链接上的未来能量流和价格。可以根据工程成本、技术可用性和可接受性进行预测。能源需求与成本最低的供应相匹配。该模型还可用于分析政府政策的影响。模型开发完成后将提供详细的软件。

模板研究提案 - WUR eDepot
首先,我要感谢 Nuffic-NFP 项目。多亏了这笔资金,我才得以参加这项研究项目。我衷心感谢我的导师指导我实现目标:Allard de Wit,他全心全意地支持和讨论我的愿望;Jan Clevers,他以一致和建设性的方式让我坚持下去。我非常感谢 Arnold van Vliet 和 Mark Grutters 提供的现场数据。如果没有这些信息,这项研究将是不完整的。我还要特别感谢 Jin Chen 愿意为我提供他的平滑方法。在工作过程中,我收到了许多有用的建议、评论和信息,特别感谢:Willy ten Haaf、Bram van Putten、Gerard Heuvelink、Arnold Bregt、Gerrit Gort、Frans Rip 和 Bradley Reed。在 Alterra 的漫长日子里,学习成为一种乐趣,亲爱的同事们 Taye、Lucinka、Jie、Teshome、Babs、Tine、Elisa、Worku 和 Jochem 大大提高了我的学习积极性。我最深切的感谢我的家人。感谢 Silvia 和 Frederik,感谢他们随时准备支持我。言语无法表达他们的支持程度。感谢 Robert,感谢他随时准备以不一致且有时具有建设性的方式批评和质疑一切。感谢 Ineke、Pearl、Julio 和 Santino。我特别感谢 Mamadou,感谢他大部分时间的耐心、理解和支持

2022 年校园博览会 - FEDIL
• 与客户和 CV 销售办公室联系,就数字渠道和渠道开发进行一般咨询 • - 回复和处理来自世界各地的客户和 CV 办公室有关数字渠道的各种问题/咨询 • - 在报告问题(登录或创建帐户)时提供 1 级支持,并在需要时升级到服务台 • - 识别渠道开发的机会(例如技术、用户体验和客户) • - 以程序/文档/知识库的形式正式化调查结果 • 支持数字销售团队逐步改进其产品 • - 收集、分析和正式化来自各个利益相关者的反馈,以提出产品改进建议(用户体验、新功能、问题……) • - 用简洁明了的用户故事来补充产品待办事项 • - 在将新功能部署到生产之前,支持用户验收测试(UAT)

新闻专线 2024 年 10 月 28 日
危重疾病、老年人发烧和败血症、危重疾病老年人的护理评估和护理、老年人危重疾病的发病率、危重疾病的降级和姑息治疗、老年病例讨论、危重疾病老年人的出院计划以及护理危重疾病老年人的护士/护理人员倦怠综合症。技能课程包括谵妄和跌倒评估工具、危重评估量表-GCS、诺顿量表和 RASS、危重疾病的转移练习-胸部理疗和危重疾病老年人的肢体锻炼。收集了反馈意见,代表们对研讨会表示高度满意。泰米尔纳德邦护士和助产士委员会为研讨会颁发了 7 个学分。

目前正在注册生物流体生物标志物研究
完整的研究名称:ALS研究长度的人的肠道微生物组的纵向评估:5年的参与者:ALS,无症状的ALS基因携带者,健康志愿者生物标志物:凳子和血液样本的目的:收集和分析粪便样本并观察到gut microbiome和Als Als Als的关系之间的关系。本研究收集的信息将进一步我们对ALS的理解,并为新型治疗剂的发展做出贡献。首席研究员:医学博士詹姆斯·贝里(James Berry),MPH赞助商:国立卫生研究院和杨百翰医院和妇女医院完整研究名称:ALS研究长度的人对肠道微生物组的评估:5年参与者:参与者:人民:不受欢迎的Als Als Gene载体,不良的Als Gene载体,健康的Volmomark and sampelpers samples and sampless sampless samples
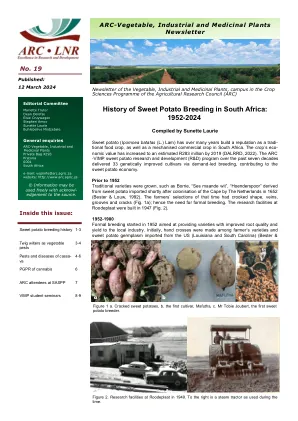
南非地瓜育种的历史:1952-2024
红薯(ipomoea batatas(L。)Lam)多年来一直以传统粮食作物以及南非的机械化商业作物而闻名。到2019年,作物的生态价值已增加到估计的2.83亿兰特(Dalrrd,2022)。在过去的七十年中,ARC -VIMP红薯研究与开发(R&D)计划通过需求主导的育种提供了33个遗传改善的品种,从而有助于红薯经济。在1952年之前种植了传统品种,例如Borrie,“ Ses Maande Wit”,“ Hoenderspoor”,源自荷兰在1652年将开普敦殖民后不久进口的红薯(Bester&Louw,1992年)。农民对那个时代的选择具有弯曲的形状,静脉,凹槽和裂缝(图1a);因此需要正式育种。Roodeplaat的研究设施建于1947年(图2)。1952-1980始于1952年的正式育种,目的是为品种提供改善的根质量和产量为当地工业提供。最初,在美国(路易斯安那州和南卡罗来纳州)进口的农民品种和红薯种质中进行了手交叉(Bester&
科学与最终现实
约翰·阿奇博尔德·惠勒(John Archibald Wheeler)是20世纪最有影响力的科学家之一。他的非凡职业已经跨越了物理学的重大进展,从核时代的诞生到量子计算机的概念。以创造“黑洞”一词而闻名,惠勒教授帮助将重生的重生作为科学的主流分支,引发了随后的天体物理学和宇宙学的爆炸性增长。His early contri- butions to physics include the S matrix, the theory of nuclear rotation (with Edward Teller), the theory of nuclear fission (with Niels Bohr), action-at-a-distance electro- dynamics (with Richard Feynman), positrons as backward-in-time electrons, the universal Fermi interaction (with Jayme Tiomno), muonic atoms, and the collective model核。他独特的思维方式,古怪的机智和对奇异的热爱激发了几代物理学家。

A. Newell 和 HA Simon 对符号人工智能的贡献
A. Newell 和 HA Simon 是 20 世纪 50 年代末至 90 年代初新兴人工智能 (AI) 领域最具影响力的两位科学家。本文回顾了他们对该领域,即符号 AI 的重要贡献。他们的贡献主要在于他们寻求在人工智能或推理产品中实现通用智能和(常识)知识,这是他们与许多其他科学家共同开展的项目,但在他们看来,该项目在理论上基于符号系统的特殊概念及其产生的表征能力,特别是在知识方面。本文重点关注 1956 年至 1982 年期间,引用了早期和晚期文献,并试图揭示它们与当今最大的统一 AI 挑战的潜在相关性,即设计完全自主的人工智能代理(又称机器人),这些代理不仅理性且合乎道德,而且具有自我意识。