XiaoMi-AI文件搜索系统
World File Search System三臂


政治经济学三论及其方法
图 3.A1。蒙特卡洛结果:𝜅𝜅 =0.5 和 2,𝜙𝜙 范围从 0 到 1,𝜌𝜌= 0.5,𝑁𝑁𝑁𝑁= 50,000 ................................................................................................................................................ 126

COP三驾车:
我们站在全球气候行动的关键时期。签署《巴黎协定》近10年后,温室气体排放量仍在增加,化石燃料的产量和使用从未有所更高,而致命的气候影响摧毁了世界各地的社区。因此,巴黎协定建立的国际气候政策架构面临一个严重的双重信誉问题:是否能够在1.5°C的温度限制限制国家中实施建筑?,它是否能够应对气候危机的根本原因?在接下来的几个月中,各国将需要在其气候计划的下一轮气候变化(全国确定的贡献或NDC)中提交《联合国气候变化》框架公约 - 用联合国气候变化的负责人西蒙·斯蒂尔(Simon Stiell)的话说,这将是“本世纪产生的最重要的气候文件之一。” 1巴黎协议的关键测试将是即将到来的NDC是否解锁了保护宜居未来所需的转型。

三年教育计划三...
所有学校都具有基于指导原则的文化,以创造有序安全的学习环境。只有在安全有序的环境中才能有效学习。改变和持续改进是健康学校系统的最可靠迹象,因为这是持续学习的证据。学习的改进不是通过仅专注于结果,而是通过专注于改善创建结果的系统来实现。想要改进的承诺是随着时间的流逝而变得更好。评估的目的是提高学生学习的表现,而不仅仅是审核它。重要的是要专注于学生学到的知识,而不是老师教的内容。我们无法在真空中传授想法 - 至关重要的是为学生提供学习的上下文和学习申请。我们学校的技术使用必须主要是为了增强和促进学习。与我们所有的合作伙伴(父母,商业,社区)紧密合作,为我们服务的孩子提供最佳的学习机会。重要的是要认识到学生以多种方式学习。
外部控制臂在营销应用中的使用......
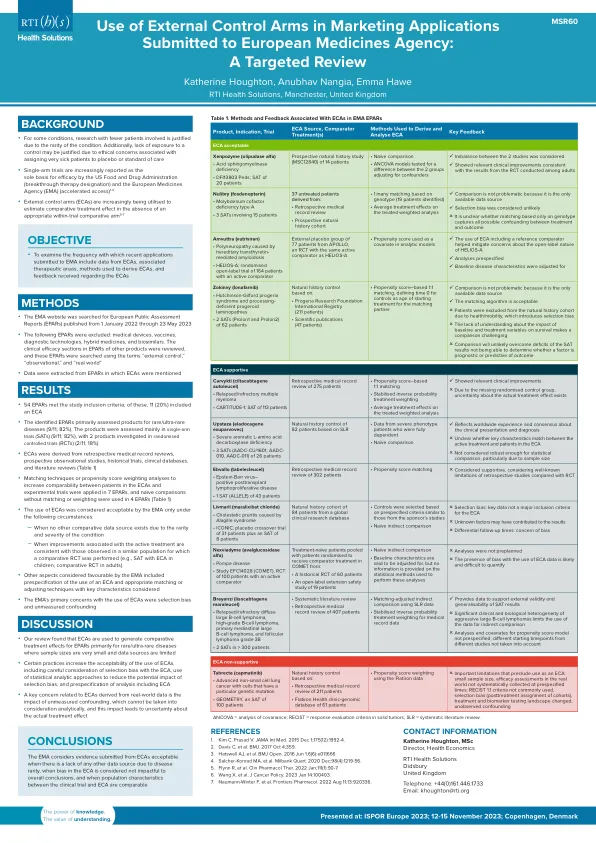
1. Kim C, Prasad V. JAMA Int Med. 2015 年 12 月 1 日;175(12):1992-4。2. Davis C 等人。BMJ。2017 年 10 月 4 日;359。3. Hatswell AJ 等人。BMJ Open。2016 年 6 月 1 日;6(6):e011666。4. Salcher-Konrad MA 等人。Milbank Quart。2020 年 12 月;98(4):1219-56。5. Flynn R 等人。Clin Pharmacol Ther。2022 年 1 月;111(1):90-7。6. Wang X 等人。J Cancer Policy。2023 年 1 月 14 日:100403。7. Naumann-Winter F 等人。Frontiers Pharmacol。 2022 年 8 月 11 日;13:920336。
副臂至下丘脑通路介导防御行为
摘要 防御行为对动物的生存至关重要。下丘脑室旁核 (PVN) 和副臂核 (PBN) 均已被证明参与防御行为。然而,它们之间是否存在直接联系来介导防御行为仍不清楚。在这里,通过逆行和顺行追踪,我们发现侧 PBN (LPB CCK) 中表达胆囊收缩素 (CCK) 的神经元直接投射到 PVN。通过在体光纤光度记录,我们发现 LPB CCK 神经元对各种威胁刺激作出积极反应。LPB CCK 神经元的选择性光激活会促进厌恶和防御行为。相反,LPB CCK 神经元的光抑制会减弱大鼠或隐约可见刺激引起的逃跑反应。 PVN 或 PVN 谷氨酸能神经元内的 LPB CCK 轴突末端的光遗传激活可促进防御行为。而局部 PVN 神经元的化学遗传和药理抑制可阻止 LPB CCK -PVN 通路激活驱动的逃跑反应。这些数据表明 LPB CCK 神经元会招募下游 PVN 神经元来积极参与逃跑反应。我们的研究确定了 LPB CCK -PVN 通路在控制防御行为方面以前未被认识到的作用。
外部评估报告《未来三体船基础技术研究》
我们按照以下步骤对三体船的开裆力矩进行了结构强度评估。 1.许用应力(*1)设定为“船级社”规定的值(*2)。 2.开裆力矩是通过使用比例模型的波浪试验来测量的。 3.通过模拟(无粘性)计算开裆力矩,并确认与模型测试结果的定性一致性。 4.考虑到模拟结果与模型试验结果的差异,将计算出的开裆力矩应用到有限元法结构模型中,计算最大产生应力,并确保该值小于许用应力。 。

绝缘玻璃纤维臂无线电控制系统钢铁人...
标准IWP设备•篮子控件•500kV锋利的电击环•测试带和盾牌•密封的玻璃纤维夹具组装•两人,36'x 72''(914 x 1829 mm)篮子•1,000 lb(454 mm)容量(454 mm)容量充电器•工厂安装•侧架,绝缘的臂臂选项•765kV•单人或定制篮•液压发音•900-1,200 lb(408-544 kg)旋转篮•45°JIB电源
使用 EMG 臂带的用户界面 - TUM Wiki-System
我要感谢所有促成这个项目的人。首先,我要感谢 Gudrun Klinker 教授和计算机辅助医疗程序与增强现实系主任为我提供这篇论文。其次,我要感谢我的导师 Sandro Weber 愿意提供这样一个项目并在我的整个工作过程中给予支持。最后,我要感谢 Thalmic Labs 提供 Myo 软件的源代码和易于阅读的 Unity3D API。我还要感谢以下所有参与用户研究并在四个月内为我的工作提供各方面帮助的人(按字母顺序排列):Okan Agca Larissa Akcetin Alp Danisman Clemens Fromm Onur Kilimci Özge Kilimci Konstantin Kirilov Waltentin Lamonos Kivanc Mertek Alex Müller Felix Novoa Ozan Pekmezci Daniel Schroter Berkay Soykan Kagan Tunca Oktay Turan Katarina Weber Baris Yolsal