XiaoMi-AI文件搜索系统
World File Search System下腿


四倍的机器人控制:使用身体平面运动控制,腿阻抗控制和贝齐尔曲线
摘要:在机器人技术中,已经证明了四足机器人在工业,采矿和灾难环境中执行任务的能力。为了确保机器人安全执行任务,其脚部位置的细致计划和精确的腿部控制至关重要。四足机器人的传统运动计划和控制方法通常依赖于机器人本身及其周围环境的复杂模型。建立这些模型由于其非线性性质可能会具有挑战性,通常需要大量的计算资源。但是,存在一种更简化的方法,该方法着重于机器人浮动基础进行运动计划的运动学模型。这种简化的方法更易于实现,但也适用于更简单的硬件配置。将阻抗控制纳入腿部运动是有利的,尤其是在穿越不平坦的地形时。本文提出了一种新颖的方法,其中四足机器人对每条腿采用阻抗控制。它利用六度的贝齐尔曲线来生成从平面运动模型中用于身体控制的腿部速度的参考轨迹。该方案有效地指导机器人沿预定义的路径。使用机器人操作系统(ROS)实施了拟议的控制策略,并通过GO1机器人的模拟和物理实验进行验证。这些测试的结果证明了控制策略的有效性,使机器人能够跟踪参考轨迹,同时显示稳定的步行和小跑步态。
单点系泊指南
1.在本船级社入级的 SPM 的入级标记应符合下列要求: (1) 在本船级社监督下建造的 SPM。+ KRS - 单点系泊 (SPM 类型 *) (SPM 中包含的主要设备项目 **) *: CALM、SALM、VALM、SPMT 等 SPM 类型。**: 标明浮标体、海底管线、锚腿、PLEM、浮管等主要设备项目。例如) (浮标体、海底管线) (浮标体、海底管线、锚腿) (浮标体、海底管线、锚腿、PLEM 等)(2) 建造后,经验船师检验,认为适合的 SPM。KRS - 单点系泊(SPM 类型 *)(SPM 中包含的主要设备项目 **) *:SPM 类型,例如 CALM、SALM、VALM、SPMT 等。**:说明主要设备项目,例如浮标体、海底管线、锚腿、PLEM、浮动软管等。例如)(浮标体、海底管线)(浮标体、海底管线、锚腿)(浮标体、海底管线、锚腿、PLEM 等)
单点系泊指南
1.在本船级社入级的 SPM 的入级标记应符合下列要求: (1) 在本船级社监督下建造的 SPM。+ KRS - 单点系泊 (SPM 类型 *) (SPM 中包含的主要设备项目 **) *: CALM、SALM、VALM、SPMT 等 SPM 类型。**: 标明浮标体、海底管线、锚腿、PLEM、浮管等主要设备项目。例如) (浮标体、海底管线) (浮标体、海底管线、锚腿) (浮标体、海底管线、锚腿、PLEM 等)(2) 建造后,经验船师检验,认为适合的 SPM。KRS - 单点系泊(SPM 类型 *)(SPM 中包含的主要设备项目 **) *:SPM 类型,例如 CALM、SALM、VALM、SPMT 等。**:说明主要设备项目,例如浮标体、海底管线、锚腿、PLEM、浮动软管等。例如)(浮标体、海底管线)(浮标体、海底管线、锚腿)(浮标体、海底管线、锚腿、PLEM 等)
建议的练习计划新秀和T恤球
伸展运动1。手臂/脖子a在“风车类型”动作中滚动手臂。首先将右臂向前旋转10次,然后切换到左臂。这可以同时使用两个手臂完成。然后,使用相同的序列更改为向后旋转。将每个位置的头部移动8-10秒。将头部从侧面到另一侧移动8-10秒。2。股四头肌这些肌肉是覆盖大腿前部的大肌肉。直立。弯曲一条腿,握住脚踝或脚的顶部。拉动弯曲的腿,直到脚后跟靠近底部。使用墙壁或队友平衡。保持10秒。切换腿。(3。腿筋这些是大腿后部的肌肉。在坐着的位置,左腿笔直,将右脚的鞋底放在左大腿内侧。将躯干弯曲向伸出的腿,使膝盖保持直线,脚部放松。保持10秒。切换腿。4。腹股沟(蝴蝶拉伸)a在坐姿的位置,背部伸直,弯曲膝盖,将脚的底部放在一起。将脚向腹股沟拉。将肘部放在膝盖上,然后将膝盖轻轻推向地板。保持10秒钟,休息并重复。5。犊牛在腿部伸直的坐姿,将右脚跟放在左脚趾的顶部。用手将右脚趾向右脚拉向身体。保持10秒。切换腿。
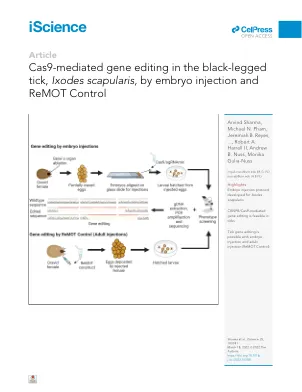
通过胚胎注射和 ReMOT 控制对黑腿蜱(Ixodes scapularis)进行 Cas9 介导的基因编辑
摘要 尽管蜱虫能够获得和传播多种致病病原体,但对蜱虫的研究却落后于蚊子等其他节肢动物媒介,这主要是因为在应用现有的遗传和分子工具方面存在挑战。CRISPR-Cas9 正在改变非模式生物研究;然而,尚未有蜱虫成功进行基因编辑的报道。注射蜱虫胚胎进行基因编辑的技术挑战进一步减缓了研究进展。目前,尚无针对任何螯合动物物种(包括蜱虫)的胚胎注射方案。在此,我们报告了一种针对黑腿蜱(Ixodes scapularis)的成功胚胎注射方案,以及使用此方案通过 CRISPR-Cas9 进行基因组编辑。我们还证明 ReMOT 控制技术可成功用于在昆虫纲之外产生基因组突变。我们的研究结果为蜱研究界提供了创新工具,对于促进我们对蜱虫传播病原体的分子机制以及宿主-媒介-病原体相互作用的潜在生物学的理解至关重要。
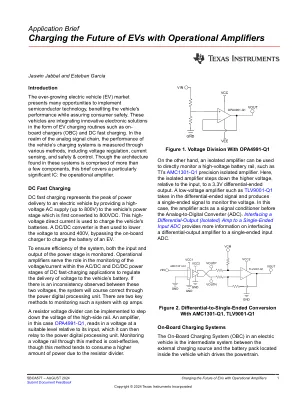
用操作放大器向HEV/EV的未来充电
监视每个单独的逆变器腿使用低侧电流传感拓扑,而无需隔离放大器就可以完成,因为每条腿的共同模式电压接近零。有三种方法可以实现低端电流感应。一,二或三转的拓扑。虽然单次测量技术趋向于更高的带宽要求,但三转解决方案要求较低的速度,通用物质放大器(例如TLV9061-Q1),因为您能够单独监视每条腿。在OBC系统中准确的电流传感的一项重要要求是确保定居时间尽可能短,这就是为什么建议将TLV9061-Q1(10 MHz Unity增益宽宽放大器(1 µs沉降时间))以使该应用程序快速响应电流的变化。