XiaoMi-AI文件搜索系统
World File Search System不变
LED 驱动控制专用电路TM1636
在有按键按下时,读键数据如下: SG1 SG2 SG3 SG4 SG5 SG6 SG7 SG8 K1 1110_1111 0110_1111 1010_1111 0010_1111 1100_1111 0100_1111 1000_1111 0000_1111 K2 1111_0111 0111_0111 1011_0111 0011_0111 1101_0111 0101_0111 1001_0111 0001_0111 在无按键按下时,读键数据为: 1111_1111 ; 七、 接口说明 微处理器的数据通过两线总线接口和 TM1636 通信,在输入数据时当 SCLK 是高电 平时, DIO 上的信号必须保持不变;只有 SCLK 上的时钟信号为低电平时, DIO 上的信号 才能改变。数据输入的开始条件是 SCLK 为高电平时, DIO 由高变低;结束条件是 SCLK 为高时, DIO 由低电平变为高电平。 TM1636 的数据传输带有应答信号 ACK ,在传输数据的过程中,在时钟线的第九个 时钟芯片内部会产生一个应答信号 ACK 将 DIO 管脚拉低。 指令数据传输过程如下图(读按键数据时序):
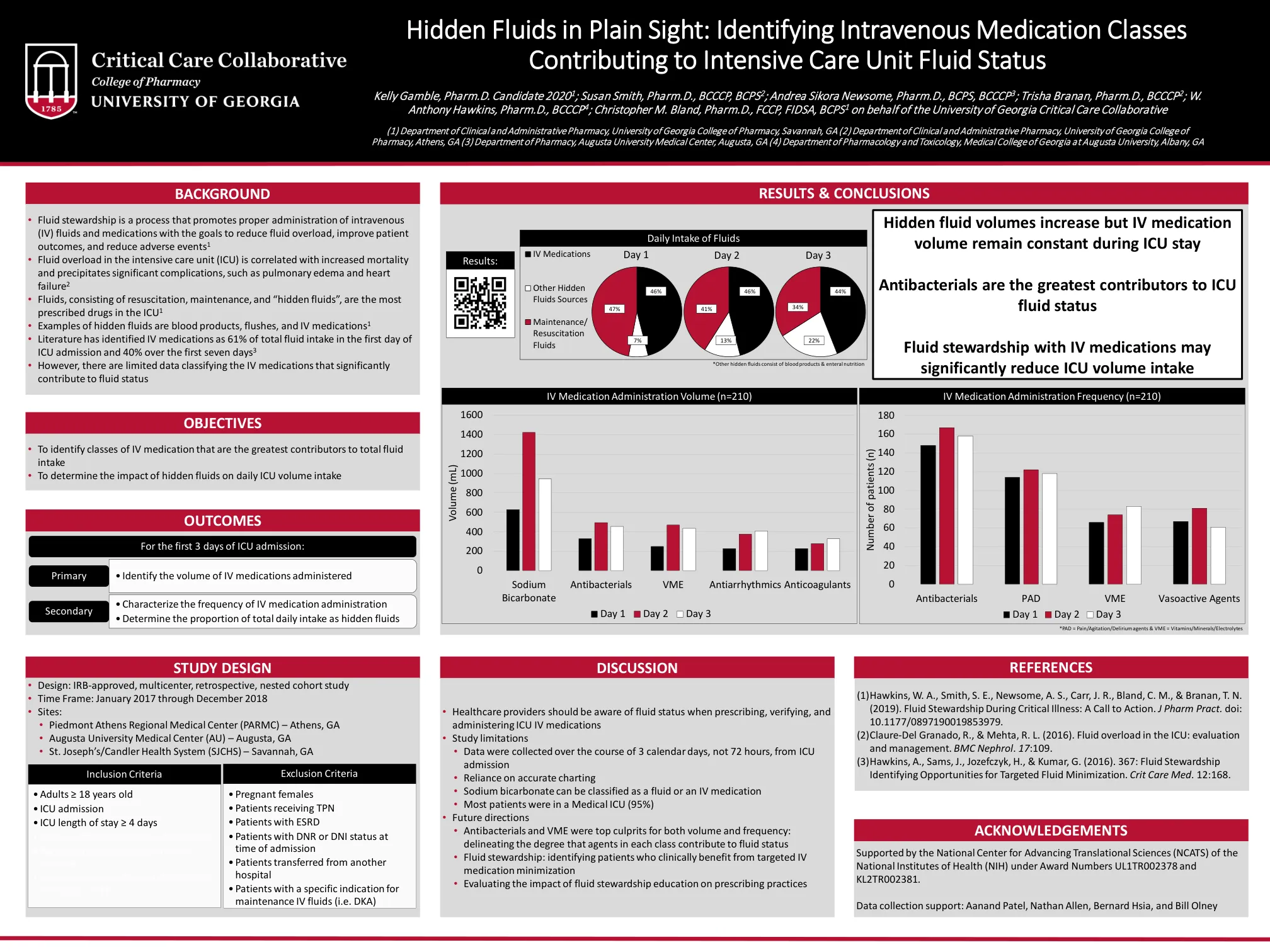
ICU 住院期间,隐性液体量增加,但静脉注射药物量保持不变 抗菌药物是 ICU 液体状态的最大因素
• 液体管理是一个促进正确管理静脉 (IV) 液体和药物的过程,目的是减少液体超负荷、改善患者预后和减少不良事件 1 • 重症监护病房 (ICU) 中的液体超负荷与死亡率增加有关,并会导致严重的并发症,例如肺水肿和心力衰竭 2 • 液体包括复苏液、维持液和“隐藏液体”,是 ICU 中最常用的处方药 1 • 隐藏液体的例子有血液制品、冲洗液和 IV 药物 1 • 文献显示,IV 药物占 ICU 入院第一天总液体摄入量的 61%,占前七天总液体摄入量的 40% 3 • 但是,对显著影响液体状态的 IV 药物进行分类的数据有限


社论:粘膜组织中分泌性免疫球蛋白 A 的合成:粘膜相关不变 T 细胞、滤泡辅助 T 细胞和 B 细胞
粘膜免疫系统 (MIS) 在维持和保护肠道免受病原体侵害方面起着根本性作用。免疫球蛋白 A (IgA) 是 MIS 的关键组成部分,也是粘膜分泌物中的主要免疫球蛋白同种型 ( 1 , 2 )。除了在中和病原体中的作用外,IgA 在维持肠道稳态、塑造微生物群和影响全身免疫方面也至关重要 ( 3 , 4 )。粘膜相关不变 T (MAIT) 细胞是一种类先天 T 细胞,它们分布在粘膜部位,有助于调节 MIS,从而提供针对微生物威胁的保护 ( 5 )。肠道相关淋巴组织中 T 细胞依赖性分泌 IgA 的 B 细胞的分化需要 T 滤泡辅助 (TFH) 细胞,它们通过细胞因子和表面分子提供关键信号 ( 6 , 7 )。了解 MAIT、B 和 T FH 在产生 IgA 中的相互作用对各种健康状况(包括自身免疫性疾病、过敏和感染)具有重要意义。最近的研究表明这些细胞类型之间存在功能性相互作用,表明粘膜免疫区室内存在协调良好的串扰,从而增强分泌性 IgA (SIgA) 产生和/或改善 MAIT 细胞功能。例如,Leung 的研究小组在体内和体外都证明了 MAIT 细胞在促进 B 细胞分化为浆母细胞并随后产生 IgA 方面的作用 (8)。此外,Salerno-Gonc ̧ alves 和同事发现 B 细胞上调 HLA-G 表达会下调 MAIT 细胞上的抑制性 HLA-G 受体 CD85j,导致 MAIT 细胞丢失 (9)。最近,Pankhurst 等人。发现 MAIT 细胞激活树突状细胞,促进 T FH 活性,增强小鼠流感 A 感染模型中抗原特异性 SIgA 的产生 ( 10 )。尽管有这些见解,但关键知识缺口仍然存在

量子物理学中的混沌、耗散、时间箭头 - GovInfo
不变。在“物理状态”中,a c 存在于一个通道,即传入通道中,b c 存在于所有通道中。当然,由于汉密尔顿量的时间反演不变性,任何这些解的时间反演状态也是一个解。确实存在时间反演不变状态,即
重大事件的报告
从2022年的9,012降低8%250或3%是在一个机构中所在机构所在机构中的人,从2022年开始不变8,032或97%的男性所在机构中的人不变,从2022222222年开始,从2022222222年开始不变。听证会从2022年的42%上升4,063%或49%是青年罪犯听证会,从2022年的44%增加了2,849或70%的听证会,或者70%是针对不确定的人,并有资格判处青年犯罪者的判决,从20222 2221年中判处1,2214或30%的判决。青年罪犯假释听证会从2022年不变3,438或42%的人有资格获得老年假释听证会的人,高于20222的39%3,165或92%的人,或者92%的人不确定地判刑的人,从20222273或8%的人中判处89%或8%的人判刑。老年假释听证会,从2022年的11%下降896或11%的不确定的人有资格参加假释听证的人作为非暴力罪犯1

Clifford 变形表面代码 - Knowledge UChicago
对于有偏 Pauli 噪声,Kitaev 表面码的各种实现都表现得出奇的好。受这些潜在收益的吸引,我们研究了通过应用单量子比特 Clifferd 算子从表面码中获得的 Clifferd 变形表面码 (CDSC) 的性能。我们首先分析 3 × 3 方格上的 CDSC,发现根据噪声偏差,它们的逻辑错误率可能会相差几个数量级。为了解释观察到的行为,我们引入了有效距离 d ′ ,它可以缩短为无偏噪声的标准距离。为了研究热力学极限下的 CDSC 性能,我们专注于随机 CDSC。利用量子码的统计力学映射,我们发现了一个相图,该相图描述了在无限偏差下具有 50% 阈值的随机 CDSC 家族。在高阈值区域,我们进一步证明,典型代码实现在有限偏差下优于最著名的平移不变代码的阈值和亚阈值逻辑错误率。我们通过构建属于高性能随机 CDSC 系列的平移不变 CDSC 来证明这些随机 CDSC 系列的实际相关性。我们还表明,我们的平移不变 CDSC 优于众所周知的平移不变 CDSC,例如 XZZX 和 XY 代码。

在大密度下QCD的定量精度
我们研究了在不均匀性手性凝结阶段中带有修饰的锥分散关系的带电倾斜对的歼灭过程的DILEPTON生产速率。我们假设双性手性密度波是一种不均匀的手性冷凝物,并在不均匀性手性凝结相中获得Nambu-Goldstone模式的分散关系。我们基于Oð4Þ对称性使用低能效率的拉格朗日,该对称是由顺序参数扩展到第六阶的。获得的分散关系是各向异性和二次动量的。我们使用所获得的分散关系通过带电的Pion-Pair歼灭作为不变质量的函数评估电子轴体生产速率。基本上,不均匀性手性凝结相中的生产率相对于不变质量的总斜率比同质性手性凝结相的质量陡峭。因此,当不变质量的质量约为两倍时,可能会提高生产率。