XiaoMi-AI文件搜索系统
World File Search System不同

不同目的地的体验经济分析#
本研究的目的是:(1)测量不同类型游客的不同目的地体验经济的四个维度,(2)研究感知体验对满意度的影响,以及(3)满意度对重游和推荐意愿的影响。为此,通过对土耳其阿拉恰特、阿拉尼亚、贝莱克和基兹卡莱西的 443 名游客进行调查收集数据。使用结构方程模型 (SEM) 检验假设的关系。根据分析结果,确定了教育、娱乐和逃避现实对满意度的显著和积极影响。游客感知到的审美体验对满意度没有显著影响。此外,游客的满意度对重游和推荐意愿都有积极影响。最后,发现游客的重游意愿显著影响他们的推荐意愿。研究结果为旅游业和旅游研究人员提供了有关体验经济和行为意愿的宝贵实证证据。本研究还在旅游文献中首次将4E体验经济模型应用于四个不同的目的地。

11. 连接不同材料
− 最简单的选择是将两种材料相互电绝缘。如果它们不电接触,就不会产生电偶。这可以通过在具有不同电势的金属之间使用非导电材料来实现。 − 可以使用防水化合物(例如油脂)或在金属上涂上不透水的保护层(例如合适的油漆、清漆或塑料)来防止与电解质接触。如果无法同时涂覆两种材料,则应将涂层应用于具有较高电极电位的材料。如果仅在活性更高的材料上涂覆涂层,则如果涂层受损,将产生较大的阴极面积,而对于暴露的非常小的阳极面积,腐蚀率将相应较高。 − 电镀或其他金属涂层也有帮助。通常使用更贵重的金属,因为它们更耐腐蚀。镀锌可通过牺牲阳极作用保护钢基体金属。
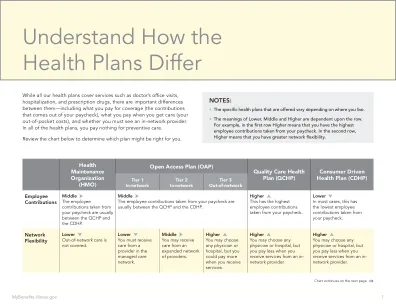
了解健康计划有何不同 | MyBenefits
虽然我们所有的健康计划都涵盖医生办公室就诊、住院和处方药等服务,但它们之间存在重要差异——包括您为保险支付的费用(从您的工资中扣除的金额)、您在接受护理时支付的费用(您的自付费用)以及您是否必须去网络内的提供商处就诊。在所有健康计划中,您无需为预防性护理支付任何费用。

确定不同结构材料的自然...
摘要:最近的文献中缺乏关于结构材料和尺寸对其固有频率影响的研究。本文的主要目的是研究材料特性对结构固有频率的影响。本研究采用了五种在工程应用中最为常用的材料(钢、混凝土、木材、塑料和铝)。针对每种材料设计和构建了一个模糊系统。它用于优化与结构高度和面积相关的固有频率值。结果表明,虽然结构高度对其固有频率有很大影响,但材料类型和结构面积也是有效变量。对于相同尺寸的结构,木材的固有频率值最高,其次是钢材,其次是混凝土。此外,还根据风、地震和交通振动对结构的固有频率进行了评估。这些结果可以为工程和设计目的提供有用的应用和建议。木材可以补充一系列材料的自然属性。本研究的启示可用于重型机械实验室、建筑结构和其他工程应用。

两种不同方法的比较研究
2里奥格兰德·杜尔(Unijuí)的西北区域大学。 ijuí/rs,巴西。 圣玛丽亚联邦大学(UFSM)。 严格的Sensu药理学研究生课程。 圣玛丽亚/RS,巴西。 https://orcid.org/0000-0002-9375-07452里奥格兰德·杜尔(Unijuí)的西北区域大学。ijuí/rs,巴西。圣玛丽亚联邦大学(UFSM)。严格的Sensu药理学研究生课程。圣玛丽亚/RS,巴西。https://orcid.org/0000-0002-9375-0745https://orcid.org/0000-0002-9375-0745

多通道人机交互信息融合的智能方法
结构在运行时可以做到即使某一个模态信息缺失整个网络也能取得不错的效果 , 在多通道情感识别、 语义理解、目标学习等领域取得很好的效果 .尽管如此 , 这类网络相对于任务来说还是相对 “ 具体 ”, 如 果要换一个任务 , 用户就需要修改网络结构包括重新调整参数 , 这使得深度神经网络结构的设计是一 个耗时耗力的过程 .因此研究者们希望一个混合的神经网络结构可以同时胜任多个任务 , 以减少其在 结构设计和训练方面的工作量 .鉴于此 , 研究者开始致力于首先采用大数据联合训练构建出多通道联 合特征分享层 , 然后在识别阶段可以同时进行多任务处理的深度多模态融合结构 .如 Google 的学者 尝试建议一个统一的深度学习模型来自适应地适配解决不同领域、不同数据模态下的多个不同类型 的任务 , 且在特定任务上的性能没有明显损失的模型 [71] .该模型构架请见文献 [71] 的图 2, 由处理输 入的编码器、编码输入与输出混合的混合器、混合输出的解码器 3 个部分构成 , 文献 [71] 的图 3 给 出了这 3 个部分的详细描述 .每一个部分的主体结构类似 , 均包含多个卷积层、注意力机制和稀疏门 控专家混合层 .其中 , 不同模块中的卷积层的作用是发现局部模式 , 然后将它泛化到整个空间 ; 注意力 模块和传统的注意力机制的主要区别是定时信号 , 定时信号的加入能让基于内容的注意力基于所处的 位置来进行归纳和集中 ; 最后的稀疏阵列混合专家层 , 由前馈神经网络 ( 专家 ) 和可训练的门控网络组 成 , 其选择稀疏专家组合处理和鉴别每个输入 .

在不同社会发展方面对可持续发展的不同社会观点的粮食和土地系统转变
摘要食品和土地系统的未来对于实现多个联合国可持续发展目标至关重要,因为它们在提供足够的营养及其对地球系统过程的重大影响方面的重要作用。尽管对转型的需求广泛共识,但讨论的策略差异很大,从技术驱动到以足够的方式为中心的方法,强调了变化和政策组合的不同推动者。本研究评估了新一代寻求目标的情景的含义。我们采用两个综合评估模型来探索三个全经济可持续发展途径(SDP)下的粮食和土地未来:经济驱动的创新,韧性社区和管理全球公共。我们的评估表明,SDPS将足够的粮食供应与行星完整性的进步保持一致,停止生物多样性丧失,减轻灌溉的不良影响以及显着降低氮污染。虽然所有SDP都符合巴黎气候目标,但它们在气候缓解工作的时机上有所不同,并专注于不同的温室气体和排放来源。经济驱动的创新途径迅速从土地系统中实现了净负CO 2排放,而途径有弹性的社区和管理全球共享的途径可显着降低农业非CO 2排放。此外,可持续性干预措施减轻了与狭义的缓解情景相关的权衡,并减少了对二氧化碳去除策略(如生物能源)的依赖,并捕获了碳捕获和储存。

面向偏远地区供电可靠性提升的配网储能电站机会 ...
2.3 运行约束 储能电站的规划与运行决策存在强耦合关 系。在不同位置接入储能电站将对系统运行的安 全性、经济性与可靠性造成不同影响。为了支持网 侧储能选址定容方案的科学决策,需充分考虑储能 充放电特性、有功 / 无功综合潮流、电压偏移限制、供 电可靠性要求等关键因素,进行精细化的运行建 模。故引入运行约束如下。 2.3.1 功率平衡约束

DVE:不同程度 - 军队安全
视觉参考和提示为飞行中的定位提供了最重要的感官输入(据估计,70-80% 的飞行定位信息是通过视觉获得的)。例如,当驾驶仪表时,机组人员可以训练忽略可能错误的前庭或躯体感觉输入,以“使仪表读数正确”。当按照 VFR 飞行时,DVE 会减少安全驾驶所必需的关键环境视觉提示。机组人员可以在 DVE 中操作,通过保持足够的视觉参考或仪表提示来了解他们的操作环境,从而实现飞机定位和空间/时间 SA。然而,在某种程度的能见度受限的情况下,机组人员的熟练程度和经验不足以弥补 DVE 内减少的提示,飞机坠毁的可能性会大大增加。

了解自动驾驶的不同级别
根据美国汽车工程师学会 (SAE) 的定义,自动驾驶分为六个级别。这些级别从代表无自动化的 0 级到代表完全自动化的 5 级不等。每个级别都表明自动驾驶技术的发展和实施向前迈出了一步。下面是每个级别的详细说明。在 0 级,没有自动化,驾驶员完全负责控制车辆。虽然车辆可能包括前方碰撞警报或紧急制动等基本系统,但这些系统不被视为自动化,因为它们不承担任何驾驶任务。驾驶员必须执行所有功能,包括转向、制动、加速和驾驶车辆。进入 1 级,我们遇到了自动化的第一阶段,称为“驾驶辅助”。在这个级别,车辆可以协助驾驶员转向或加速和制动,但不能同时进行。例如,自适应巡航控制等功能有助于保持设定的速度,同时调整与前方车辆的距离。车道保持辅助系统还提供轻微的转向调整,以保持车辆在车道上。