XiaoMi-AI文件搜索系统
World File Search System不完全

预测使用机器学习模型用流动机处理的颅内动脉瘤的不完全闭塞
客观的颅内囊力瘤是血管畸形,导致80%的非创伤性脑出血。最近,流动分流已被用作侵入性较少的手术治疗替代方案。但是,在25%的病例中,他们在6个月后无法完全闭塞。在这项研究中,作者使用Ma-Chine学习(ML)构建了一种工具,以预测与流动机处理后6个月后6个月后的动脉瘤闭塞结果。包括2011年1月至2017年12月之间在第三纪转介中心接受管道栓塞装置治疗的616名患者中,总共667例动脉瘤。为了构建预测工具,进行了两个实验。在第一个实验中,使用与患者风险因素和动脉瘤形态学特征相关的26个特征,将六种ML算法(支持向量机[SVM],决策树,随机森林[RF],K-Nearest邻居,XGBoost和Catboost培训)。在第二个例外情况下,使用Shapley添加说明(SHAP)分析在RF模型上提取的前10个功能进行了训练。结果结果表明,即使使用特征子集(83%的精度),即使在LR模型的SVM模型vs 62%的SVM模型与62%的SVM模型vs 62%的精度相比,SVM模型的准确性为89%(精度为83%)。塑形分析表明,年龄,高血压,吸烟状况,分支血管受累,动脉瘤颈部和较大的直径尺寸是有助于准确预测的最重要特征。在这项研究中得出结论,开发了一种基于ML的工具,该工具成功地预测了经过流动转移治疗的颅内动脉疫苗的结果,从而有助于神经外科医生实践更精致的方法和患者量化的药物。

量子算法,用于确切的最小ESOP最小化,不完全指定的布尔函数和可逆合成
独家产品总和(ESOP)最小化问题长期以来一直对研究界有所了解,因为它在经典逻辑设计(包括测试的低功率设计和设计),可逆逻辑合成和知识发现等方面具有重要意义。但是,对于任意函数的七个变量,尚无确切的最小化方法。本文介绍了一种新型的量子古典杂化算法,可用于最小化不完全指定的布尔函数的确切最小的ESOP最小化。该算法从约束和利用Grover的算法提供的量子加速度构建或构造,从而找到了这些甲壳的解决方案,从而改善了经典算法。与许多现有算法相比,ESOP表达式的编码可导致的决策变量大大减少。这也扩展了确切的最小ESOP最小化的概念,以最大程度地降低将ESOP表达作为量子电路的成本。在作者知识的范围内,这种方法从未出版过。通过量子模拟对该算法进行了完全且未完全指定的布尔函数测试。

Metixene 是转移性癌症和脑转移的临床前模型中的不完全自噬诱导剂
引言:转移是癌症的一个特征,也是癌症相关死亡的主要原因(1)。脑转移是中枢神经系统恶性肿瘤最常见的类型。脑转移常常表现为神经系统损伤,预示着生活质量下降并限制生存结果。据估计,10%–30% 的癌症患者会在疾病的某个阶段发生脑转移(2)。然而,由于诊断技术的提高和通过全身治疗更好地控制颅外疾病,扩散至中枢神经系统的外周癌症的发病率可能正在增加(3, 4)。乳腺癌是脑转移的主要原因之一(5)。它是女性中最常见的癌症,全球每年有 230 万女性受到影响(6)。它也是女性癌症相关死亡的最常见原因,全球几乎每个地区的发病率都在增加(7)。脑转移的发生率取决于乳腺癌的分子亚型,人类表皮生长因子受体 2 阳性 (HER2 阳性) 和三阴性乳腺癌的脑转移率高达 50% (8, 9)。

通过模态混合和深度监督进行脑部疾病诊断的多模态连接组的不完全学习
近年来,多模态脑网络研究通过刻画脑网络的多种连接类型及其内在的互补信息,大大提高了脑疾病诊断的效率。尽管多模态技术取得了令人鼓舞的性能,但大多数现有的多模态方法只能从具有完整模态的样本中学习,这浪费了大量的单模态数据。此外,大多数现有的数据插补方法仍然依赖于大量具有完整模态的样本。在本研究中,我们提出了一种模态混合数据插补方法,通过随机抽取不完整样本并将其合成为完整数据进行辅助训练。此外,为了减轻合成数据中不配对模态间互补信息的噪声,我们引入了一个具有深度监督的双边网络,以使用疾病特定信息改进和规范单模态表示。在 ADNI 数据集上的实验证明了我们提出的方法在不同完整模态样本率方面的疾病分类优势。关键词:脑连接组,不完全学习,深度监督,脑功能障碍,缺失模态

在高宽高比结构中对原子层沉积过程中的不完全结合性进行建模
原子层沉积允许精确控制膜厚度和形式。它是高纵横比结构(例如3D NAND记忆)的关键推动因素,因为它的自限性行为比传统过程更高的合并性。然而,随着纵横比的增加,经常发生与完全保征的偏差,需要全面的建模以帮助开发新技术。到此为止,我们为存在不完整的整合性的原子层沉积过程中提供了一个模型。该模型结合了基于Knudsen扩散和Langmuir动力学的现有方法。我们的模型通过(i)通过Bosanquet公式融合了气相扩散率以及在Yanguas-Gil和Elam首先提出的建模框架中的反应可逆性,以及(ii)有效地集成在级别设定的地形模拟器中。该模型在侧面高纵横比结构中手动校准了Al 2 O 3的原型原子层沉积结果。我们研究了h 2 o步的温度依赖性,从而提取了0的活化能。178 eV与最近的实验一致。在TMA步骤中,我们观察到Bosanquet公式的精度提高,并以相同的参数集复制了多个独立的实验,这突显了模型参数有效地捕获了反应器条件。
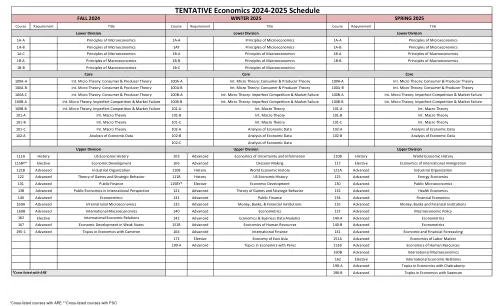
2024-2025 年经济学暂定课程安排
100B-A 国际微观理论:不完全竞争与市场失灵 100B-B 国际微观理论:不完全竞争与市场失灵 100B-B 国际微观理论:不完全竞争与市场失灵
在原发性或不完全切除或复发性胶质母细胞瘤中对伊马替尼的开放标签II期评估
摘要目的:临床前研究表明,伊马替尼通过抑制酪氨酸激酶活性在胶质母细胞瘤中具有单药活性,并且可能提高放射疗法的功效。因此,我们试图对新诊断和复发性胶质母细胞瘤的患者进行投资临床疗效,并结合放射疗法。方法:我们进行了一项非随机,2臂,开放式的II期试验,其中包括18岁或以上的患者,其ECOG性能状态为0-2,该状态为0-2,该状态是新近诊断(ARM A)具有可测量的肿瘤(即不完整的切除术或活检后),或者在诊断为gloioblblastsom症状后(不完整的切除或活检后)。手臂A的患者接受了600 mg/天的伊马替尼与降压放射疗法(每分分数为2.5 gy,

生活。 V. Chaika
2. 作品设计、参考文献和所用资料清单是否符合课程作业的监管要求 - 共计 10 分(完全符合 - 10 分,设计中存在轻微错误 - 8 分,设计中存在重大错误 - 4 分,设计大多不正确 - 0 分) 3. 引言是否符合监管要求 - 共计 10 分(完全符合 - 10 分,不完全符合 - 8 分,部分符合 - 4 分,不符合要求 - 0 分) 4. 科学文献综述是否符合监管要求 - 共计 15 分(完全符合 - 15 分,不完全符合 - 10 分,部分符合 - 5 分,不符合要求 - 0 分) 5. 研究实践部分是否符合监管要求 - 共计 20 分(完全符合 - 20 分,不完全符合 - 15 分,部分符合 - 10 分,不符合要求要求 – 0 )
