XiaoMi-AI文件搜索系统
World File Search System主控

MA-3300D 数字主控切换器
Master APS可根据NTP精确控制MA-3300HD主控切换台、VTR、视频服务器等。一台Master APS终端可控制一台MA-3300HD主控切换台,控制系统可安装数据编辑终端。在多路传输中,双服务器系统可实现高可靠性和高性能。
LightCycler® 多重 DNA 主控
2. 如何使用本产品................................................................................................................................................5 2.1. 开始之前....................................................................................................................................................................5 样品材料...................................................................................................................................................................................5 对照反应...................................................................................................................................................................................5 引物...................................................................................................................................................................................................5 探针...................................................................................................................................................................................................5 Mg 2+ 浓度....................................................................................................................................................................................5 一般注意事项...................................................................................................................................................................5 注意事项...................................................................................................................................................................................5 2.2.协议................................................................................................................................................................................................................ 6 LightCycler ® PRO、LightCycler ® 480 和 LightCycler ® 96 系统协议........................................................................ 6 LightCycler ® PRO 系统(多孔板 96 或 384)的使用协议......................................................................... 6 LightCycler ® 480 仪器 II(多孔板 96 或 384)的使用协议......................................................................... 7 LightCycler ® 96 仪器的使用协议.........................................................................................................................10 LightCycler ® PRO、LightCycler ® 480 和 LightCycler ® 96 仪器的 qPCR 反应设置.............................................................................................11 LightCycler ® 2.0 仪器的使用协议.........................................................................................................................12 LightCycler ® 2.0 仪器的 qPCR 反应设置仪器.................................................................................................15
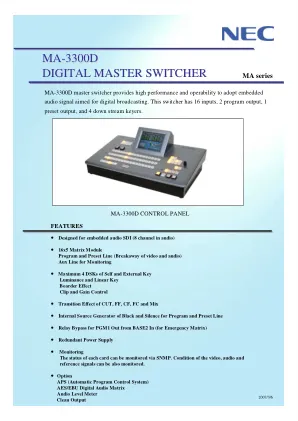
MA-3300D 数字主控切换器 - NEC 公司
如需进一步了解详情或进行咨询,请联系: NEC 公司广播和控制系统销售部海外销售部 东京都港区芝 5 丁目 7-1 邮编 108- 8001 电话:+81 3 3798 5463(拨入) 传真:+81 3 3798 8476 URL http://www.sw.nec.co.jp/bv/hoso/

人工智能技术在非常规领域的应用
提高非常规天然气产量预测速度和准确性是科学高效开发非常规资源的关键。现有的基于传递机制的预测方法对模型进行了假设和简化,难以全面准确地评估产能主控因素,导致产量预测误差较大。本文提出了一种基于人工智能(AI)和数据挖掘技术的非常规天然气井产能预测方法。利用皮尔逊相关系数和灰色关联分析筛选出主控因素,通过训练和比较多种常用的机器学习方法,优选出最佳产量智能预测模型。本文以加拿大阿尔伯塔省致密气田为例,说明该方法的有效性和实用性。

用于异构多机器人系统联合仿真的可靠、低延迟同步中间件
摘要 — 最近的物联网 (IoT) 网络涵盖大量固定和机器人设备,即无人地面车辆、水面舰艇和空中无人机,以执行搜索和救援行动、野火监测、洪水/飓风影响评估等关键任务服务。由于基于物理的机器人操作系统 (ROS) 模拟器是基于时间的,而基于网络的无线模拟器是基于事件的,因此实现这些设备之间的通信同步、可靠性和最小通信抖动是模拟和系统级实现的关键挑战,此外还有部署在现实环境中的移动和异构 IoT 设备的复杂动态。然而,在将异构多机器人系统付诸实践之前,物理(机器人)和网络模拟器之间的同步是最难解决的问题之一。现有的基于 TCP/IP 通信协议的同步中间件主要依赖于机器人操作系统 1 (ROS1),由于其基于主控的架构,会消耗大量通信带宽和时间。为了解决这些问题,我们设计了一种新型的机器人与传统无线网络模拟器之间的同步中间件,该中间件依赖于新发布的具有无主数据包发现机制的实时 ROS2 架构。我们提出了一种地面和空中代理的速度感知传输控制协议 (TCP) 算法,使用数据分发服务 (DDS) 的发布-订阅传输,以最大限度地减少不同机器人代理之间的数据包丢失和同步、传输和通信抖动。我们提出的中间件与特定的机器人和网络模拟器无关,但对于模拟和实验,我们使用 Gazebo 作为基于物理的 ROS 模拟器,并使用 NS-3 作为无线网络模拟器。我们在模拟和系统层面对数据包丢失概率和平均延迟进行了广泛的网络性能评估,使用视距 (LOS)/非视距 (NLOS) 和 TCP/UDP 通信协议,通过我们提出的基于 ROS2 的同步中间件。此外,为了进行比较研究,我们进行了一项详细的消融研究,用实时无线网络模拟器 EMANE 替换 NS-3,用基于主控的 ROS1 替换无主控的 ROS2。最后,为了在实践中实现转变,我们在不同的地形上部署了一组不同的真实机器人——一架空中无人机 (Duckiedrone) 和两辆地面车辆 (TurtleBot3 Burger),形成了无主控 (ROS2) 和主控 (ROS1) 集群,以评估潜在的网络同步和抖动问题。我们提出的中间件证明了使用一组不同的固定和机器人设备构建大规模物联网基础设施的前景

使用仲裁器在 AHB IP 中进行多主通信
本研究详细阐述了具有四个主控与单个内存系统交互的 AMBA 总线接口,在内存控制器和其他支持外设之间使用仲裁器。使用 VHDL 开发了不同的模块,即 AHB MSTER、AHB SLAVE INTERFACE 和 AHB ARBITER(循环算法)。进一步将 FIFO、RAM 和 ROM 与内存控制器集成。四个 AHB 主控在仲裁器的帮助下启动操作并在单个总线上向内存控制器生成必要的控制信号。与 AHB BUS 系统中多数据通信的先前研究相比,所提出的架构显示了区域高效的管理。该系统模型与 Xilinx XC6vx75t-2ff484 合成,并使用 MODELSIM 进行仿真。索引词:AMBA、AHB Master、AHB Slave、AHB Arbiter、SOC、Xilinx。© 2020 由 MECS Publisher 出版。由现代教育和计算机科学研究协会负责选择和/或同行评审

用于协作的可靠且低延迟同步中间件...
摘要 — 最近的物联网 (IoT) 网络跨越众多固定和机器人设备,即无人地面车辆、水面舰艇和空中无人机,以执行关键任务服务,例如搜索和救援行动、野火监测、洪水/飓风影响评估。实现这些设备之间的通信同步、可靠性和最小通信抖动是模拟和系统级实现的关键挑战,因为基于物理的机器人操作系统 (ROS) 模拟器是基于时间的,而基于网络的无线模拟器是基于事件的,此外还有部署在现实环境中的移动和异构 IoT 设备的复杂动态。尽管如此,在将异构多机器人系统转化为实践之前,物理(机器人)和网络模拟器之间的同步是最难解决的问题之一。现有的基于 TCP/IP 通信协议的同步中间件主要依赖于机器人操作系统 1 (ROS1),由于其基于主控的架构,它消耗了大量的通信带宽和时间。为了解决这些问题,我们设计了一种新型的机器人和传统无线网络模拟器之间的同步中间件,它依赖于新发布的实时 ROS2 架构和无主数据包发现机制。我们提出了一种地面和空中代理的速度感知传输控制协议 (TCP) 算法,使用数据分发服务 (DDS) 的发布-订阅传输,以最大限度地减少不同机器人代理之间的数据包丢失和同步、传输和通信抖动。我们提出的中间件与特定的机器人和网络模拟器无关,但对于模拟和实验,我们使用 Gazebo 作为基于物理的 ROS 模拟器,使用 NS-3 作为无线网络模拟器。我们对基于 ROS2 的同步中间件,在数据包丢失概率和平均延迟方面进行了广泛的网络性能评估,包括视距 (LOS)/非视距 (NLOS) 和 TCP/UDP 通信协议。此外,为了进行比较研究,我们进行了一项详细的消融研究,用实时无线网络模拟器 EMANE 替换 NS-3,用基于主控的 ROS1 替换无主控 ROS2。我们提出的中间件证明了使用多种固定和机器人设备构建大规模物联网基础设施的前景最后,为了在实践中实现转变,我们在不同的地形上部署了一组不同的真实机器人——一架空中无人机(Duckiedrone)和两辆地面车辆(TurtleBot3 Burger),形成了无主(ROS2)和有主(ROS1)集群,以评估潜在的网络同步和抖动问题。
MicroLogix™ 1500 可编程控制器 - RS Components
1 硬件概述 硬件概述。.......................。。。。。。。。。。。。。。。。。。。。。。。。.....1-1 组件描述 ................。。。。。。。。。。。。。。。。。。。。。。。。.......1-2 通信选项 ...............。。。。。。。。。。。。。。。。。。。。。。。。........1-5 2 安装您的控制器机构认证 .............。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-1 遵守欧盟指令。..... div>............。 。 。 。 。 。 。 . . . . . . div> . . . . . . 2-2 一般注意事项 . . . . . . < /div> . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . . . . . . . . 2-3 安全注意事项 . . . < /div> . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . . . . . . . . . . . . 2-4 电源考虑 . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。。。。。。。。...... div>......2-2 一般注意事项 ...... < /div>.....。。。。。。。。。。。。。。。。。。。。。。。。...... div>.........2-3 安全注意事项 ... < /div>.....。。。。。。。。。。。。。。。。。。。。。。。。...... div>............. 2-4 电源考虑 . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。.2-4 电源考虑 ....。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。...... div>..2-6 防止过热 ...。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . 2-8 主控继电器。 . . 。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . . . . . . 2-8 基座安装尺寸 . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . 2-13 控制器间距。 . . . 。 。 。。。。。。。。。.....。。。。。。。。。。。。。。。。。。。。。。。。...... div>..2-8 主控继电器。..。 。 。 。 。 。 。 。 . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . . . . . . . 2-8 基座安装尺寸 . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . . . . . . div> . 2-13 控制器间距。 . . . 。 。 。。。。。。。。。.....。。。。。。。。。。。。。。。。。。。。。。。。...... div>.......2-8 基座安装尺寸 ....。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。...... div>.2-13 控制器间距。...。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-13 安装控制器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-14 安装控制器组件。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-18 3 连接控制器电线要求。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.........3-1 使用浪涌抑制器。............。。。。。。。。。。。。。。。。。。。。。。。。..........3-4 将控制器接地。...........。。。。。。。。。。。。。。。。。。。。。。。。............3-7 接线图 ............。。。。。。。。。。。。。。。。。。。。。。。。....................3-8 吸电和拉电电路。..。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。3-8 控制器 I/O 接线。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。3-14 4 连接系统默认通讯配置。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4-1 使用通信切换按钮。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4-2 连接到 RS-232 端口。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.............4-3 连接到 DH485 网络 ...........。。。。。。。。。。。。。。。。。。。。。。。。........4-8 连接 AIC+。.............。。。。。。。。。。。。。。。。。。。。。。。。............4-12 DeviceNet 通信 ............。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。4-20