XiaoMi-AI文件搜索系统
World File Search System主控制

三重电传操纵备用控制系统
三个备用控制系统通道的每个轴上的积分器提供电子配平、均衡和同步。当主通道接通时,备用控制系统伺服命令与这些积分器的主伺服命令同步。这些输入到备用控制系统表决器中,即使控制传感器输出和系统间控制规则存在差异,它们仍会跟踪主通道伺服命令。在从主控制系统切换到备用控制系统期间,必须将备用控制系统与主控制系统持续同步,以尽量减少控制面瞬变。如果主系统发生故障或飞行员命令脱离,就会发生切换。同步网络的带宽约为 2.5 赫兹
AERS – 工业电池存储 SAS - FENIX
BMS 系统 + AcuBlock 管理:SAS 站使用现代蓄电池 LiFePO4 大容量电池,具有高电流容量,并配备由 AERS 设计的我们自己的 BMS 系统。BMS 系统包含 8 个独立电池组(称为 AcuPack),可永久监控所有运行值。由独立 AcuPacks 组成的串联蓄电池组装成基本 AcuBlock 容量模块。所有属于 AcuBlock 的 BMS 单元都通过工业 CAN 通信总线与主控制 BMS 控制器互连。各个 AcuBlock 可以进一步并联互连。BMS 控制器是主控制单元,可与主上级 PMS 系统和电源逆变器进行通信,并配备相关 AcuBlock 的电源断路器。
利用长链捕获离子扩展量子计算机
4 集成离子阱系统 90 4.1 真空室子系统. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106 4.5 成像子系统 . . . . . . . . . . . . . . 108 4.6 控制子系统 . . . . . . . . . . . . . . 111 4.6.1 主控制子系统 . . . . . . . . . . . . . . 112 4.6.2 相干射频控制子系统 . . . . . . . . . . . . . . 113

自动导向车辆(AGV)和主控件之间通信的接口
描述AGV和主控制器之间通信的标准,因此是将运输系统整合到使用合作运输车辆的连续过程自动化中的基础。通过提高车辆自主权,过程模块和界面以及优选的事件控制命令链的刚性序列,提高了灵活性。根据需要的信息(例如,订单信息),缩短了由于高“插头和播放”功能而导致的实施时间,通常是由中央服务提供的,通常是有效的。车辆应能够与制造商独立于制造商进行实施,并考虑到职业安全的要求。通过使用统一的,总体的协调与所有运输车辆,车辆型号和制造商的相应逻辑,通过使用统一的,总体的协调来降低和增加系统的“插头”功能。使用车辆控制和协调水平之间的共同接口提高制造商的独立性。通过在专有主控制和上级主控制之间实施垂直通信的专有DTS库存系统的集成(参见图1)。

CH32V00X-EVALAUTION-BOARD-REFERENCH-EN.PDF-CH405实验室
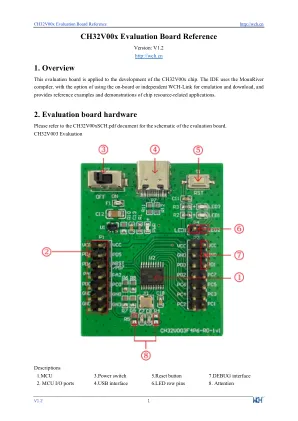
上面显示的CH32V003评估委员会带有以下资源。主板-CH32V003EVT 1。主控制MCU:CH32V003F4P6 2。mcu i/o端口:i/o主控制MCU的插口接口3。电源开关S2:用于断开或连接外部5V电源或USB电源4。USB接口:仅电源,不使用USB功能5。按钮S1:重置按钮,用于主MCU的外部手动重置,需要将用户选择Word寄存器的rst_mode位为非111B,以打开重置功能。6。LED:LED通过LED行引脚连接到主芯片I/O端口(P4)7。调试接口:用于下载,模拟调试,单线通信,只需要SWDIO即可连接PD1 8。pa1和pa2作为水晶引脚,因此R4,R5电阻不会违约,P1行会导致PA1和PA2引脚功能,如果您需要将PA1和PA2引脚用作普通的I/O,则需要焊接自己的PA1和PA2引脚,而需要卸下Y1,C7,C7,C8。
利用远程安装技术和数字化优化阀门性能和可靠性
远程安装位置检测器或远程检测单元 (RDU)(有时称为)可用于线性和部分回转执行器。它们的主要优势在于定位器的传感反馈部分与主控制外壳物理分离。控制器单元安装在一定距离之外,并通过电缆连接到位置检测系统,并通过一条或两条气动管线连接到执行器。传感单元检测阀杆的位置并将反馈信号传输到包含电子设备的外壳。