XiaoMi-AI文件搜索系统
World File Search System主机

用主机简化体外工程生物文化的筛选设置
工程生存材料(ELMS)通常包含细菌,真菌或夹在聚粉基质中的动物细胞,在药物输送或生物传感等领域提供了无限的可能性。确定在确保与ELM宿主兼容的同时保持ELM性能的条件至关重要,然后在体内测试它们。这对于减少动物实验至关重要,可以通过体外研究来实现。当前,尚无标准来确保ELM与宿主组织的兼容性。朝向这个目标,我们设计了一种基于96孔板的筛选方法,以简化跨培养条件的ELM生长,并确定其体外的兼容性潜力。我们显示了随着时间的流逝,三种细菌物种的增殖,并筛选了六种不同的细胞培养基。我们以双层和单层格式制造了榆树,并跟踪细菌泄漏,以衡量ELM生物植物的量度。筛选后,选择了适当的培养基,该培养基可持续榆树生长,并用于在体外研究细胞相容性。通过添加ELM上清液并分别测量细胞Mem Brane完整性和活/死染色,研究了鼠纤维细胞和人单核细胞上的ELM细胞毒性。我们的工作说明了一个简单的设置,以简化榆树兼容环境条件与主机的筛查。

适用于 IBM AIX 的 Dell EMC 主机连接指南
1 基本逻辑存储概念 ................................................................................................................ 21 2 基本 SRDF 配置 ................................................................................................................ 53 3 虚拟 SCSI 配置示例 ........................................................................................................ 88 4 虚拟光纤通道体系结构示例 ................................................................................................ 92 5 AIX LPAR 初始设置示例 ...................................................................................................... 119 6 虚拟 I/O 服务器设置示例 ...................................................................................................... 120 7 最终设置示例 ...................................................................................................................... 121 8 双 VIOS 示例 ................................................................................................................ 141 9 MPIO 解决方案 ................................................................................................................ 219 10 Symmetrix 上的虚拟资源调配 ................................................................................................ 240 11 精简设备和包含数据设备的精简存储池 ................................................................................ 243 12 延伸群集示例 ................................................................................................................ 314 13 链接群集示例 ................................................................................................................ 315 14 使用物理 I/O 服务器示例 ................................................................................................ 321 15 使用虚拟 I/O 服务器的节点示例 .......................................................................................... 322 16 添加通知方法对话框示例 ................................................................................................ 333 17 四节点 GPFS 群集示例 ................................................................................................ 341 18 VPLEX 资源调配和导出存储过程 ...................................................................................... 363 19 创建存储视图 ................................................................................................................ 371 20 注册启动器 ............................................................................................................................. 372 21 向存储视图添加端口 ............................................................................................................. 373 22 向存储视图添加虚拟卷 ............................................................................................................. 373
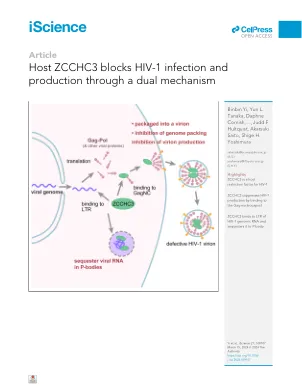
主机ZCCHC3通过双重机制阻止了HIV-1感染和生产
总结大多数哺乳动物细胞通过表达激活免疫系统的各种限制因子和传感器来防止病毒感染和增殖。已经鉴定出抑制人类免疫缺陷病毒1型(HIV-1)的几种宿主限制因子,但大多数人都被病毒蛋白拮抗。在这里,我们以CCHC型锌 - 纤维纤维蛋白3(ZCCHC3)为抑制HIV-1和其他逆转录病毒的产生的新型HIV-1限制性FACER,但似乎并未被病毒蛋白直接拮抗。它通过通过锌 - 纤维基序与GAG Nucleocapsid(GAGNC)结合起作用,该基序抑制了病毒基因组募集并导致基因组较高的病毒体产生。ZCCHC3还通过中间折叠结构域与病毒基因组上的长时间重复结合,将病毒基因组隔离为P体,从而导致病毒复制和产生减少。这种独特的双作用抗病毒机制构成了ZCCHC3的上调,这是一种新型的潜在治疗策略。

资源竞争和主机反馈是肠道微生物群的政权转变
摘要:肠道病原体在人类肠道中的传播在许多相互作用的因素上,包括病原体暴露,饮食,宿主肠道环境和宿主微生物群,但是这些因素如何共同影响感染结果的特征仍然很差。在这里,我们在肠道中开发了一种互助和致病分类单元之间的宿主介导的资源竞争模型,该模型旨在解释为什么暴露于相同病原体的类似宿主会产生如此不同的感染结果。我们的模型成功再现了与健康和感染状态之间过渡有关的经验观察到的现象,包括(1)病原体接种物的病原体之间的非线性关系与感染持续性,(2)与宽光谱抗生素治疗期间或与Bradys Bribiotics一起治疗期间或治疗期间的慢性感染风险升高, (4)益生菌赋予的潜在保护免受感染的潜在保护。然后,我们使用该模型来探索宿主介导的干预措施(即,电子供体供应率(例如饮食纤维)和呼吸电子受体(例如氧气)的供应率如何可能用于直接直接肠道群落组装。我们的研究表明,宿主和肠道菌群之间的资源竞争和生态反馈是如何成为人类健康结果的关键终止。我们确定了几个可测试的模型预测,准备进行实验验证。

斑马鱼:一种未充分利用的工具,用于在主机中发现 -
K01AG049152,R01AG062588,R01AG057234,P30AG062422,P01AG019724,U19AG079774,P01AG19772403,P5023501,P5023501,K23AG0727272727272727272727272727682727314,R0000735514,R000014,R000014,RRO000016827271,RRO00007AG06,RO00 rc0073514,RRRY00AG0682 1ZIAAG000539-01; NIH未诊断的疾病计划,未诊断的疾病网络; Hudsonalpha基金会记忆和移动基金;雨水慈善基金会; NIH国家药物滥用研究所,赠款/奖励号:75N95022C00031; Larry L. Hillblom基金会,赠款/奖励号:2016-A-005-SUP; Bluefield项目可以治愈额颞痴呆;阿尔茨海默氏症协会;全球大脑健康研究所;法国基金会;玛丽·奥克利基金会; NIH壁内培训和教育办公室; Chan-Zuckerberg倡议的神经退行性挑战网络; NIH国家神经系统疾病与中风研究所,赠款/奖励号:U54NS123985; NIH国家通用医学科学研究所,赠款/奖励号:FI2GM142475
VK1S68C 数据手册
按键键扫描由硬件自动完成,用户只需要按照时序读按键值。完成一次键扫需 要 2 个显示周期,一个显示周期大概需要 4ms ,在 8ms 内先后按下了 2 个不同的按 键, 2 次读到的键值都是先按下的那个按键的键值。 主机发送读按键命令后,开始顺序读取 5 字节的按键数据,读按键数据从低位 开始输出,某个按键按下时,其对应的按键数据字节内的 bit 位置 1 。

附件1 |超越研究项目,包括描述,主机组织,主管,持续时间和工作地点。
•描述:该研究项目的目的是通过使用多参数流式细胞仪与人工智能和生物学结合处理,在诊断和不同的治疗后,通过使用多参数流式细胞仪数据来更好地预测最小残留疾病(MRD)(MRD)(MRD)(MRD)的发育和动力学以及急性白血病和髓样白血病(ALL&AML)的复发。此外,研究人员将建立数学预测模型,鉴定出新型药物的最佳抗白血病功效,并将找到有效的组合策略(用于协同作用)可能会降低MRD以增加疾病特异性生存。为此,研究人员将使用已在ALL和AML进行的药物测试实验的可用数据。此外,还将创建生物信息学和数据科学工具,以整合来自不同临床试验的数据,以及不同的MRD生物标志物,包括将在网络中鉴定出的新型生物标志物(既有白血病特异性和环境(免疫)因素)。此外,将开发新的高级分析数据门户,以整合来自相同材料的不同平台的数据,并从本网络内部和外部产生的不同材料中得出。该项目的最终目标是生产产品,以更好地估计使用更多和更好的数据对治疗结果的更好估计来支持共享的医疗决策,这最终将改善治疗结果和患者。


bq769x2经常询问问题
无需外部处理器。该设备包含一个OTP内存,该内存允许用户控制预设配置,以最佳满足设备电源的需求。2。部分自治:该设备自主检测故障并禁用FET。这会触发到主机设备的中断,并允许主机通过发送诸如0x0093 DSG_PDSG_OFF()之类的命令来保持FETS禁用,0x0094 CHG_PCHG_OFF()或0x0095 ALL_FETS_OFF()。主机决定恢复操作是安全的,主机可以发出0x0096 all_fets_on()命令以重新启用所有FET。3。手动控制:该设备检测保护故障,并通过警报引脚为主机处理器提供中断。此信息由主机读取,并允许决定是否禁用FET。为了加快关闭期,CFETOFF和DFETOFF引脚可以由主机驱动。之后,主机处理器决定何时安全地恢复操作并可以重新启用FET。

OpenShift容器平台4.14与基于代理的安装程序
控制平面主机之一在启动过程开始时运行辅助服务,并最终成为引导程序主机。此节点称为Rendezvous主机(节点0)。辅助服务确保所有主机都满足要求并触发OpenShift容器平台群集部署。所有节点都具有写入磁盘的Red Hat Enterprise Linux CoreOS(RHCOS)图像。非引导节点重新启动并启动集群部署。重新启动节点后,会合主机重新启动并加入群集。引导程序已完成,并且部署了群集。