XiaoMi-AI文件搜索系统
World File Search System主系统

一种用于机载分布式 POS 的传递对准方法...
摘要 机载分布式定位定向系统(POS)可以满足多点运动参数测量的需求。它依赖于从高精度主系统到从系统的传递对准来获得所有点的高精度运动参数。分布式POS的一个关键问题是确定适当处理飞行器挠曲的方法,实现高精度传递对准。本文首先分析了飞行器挠曲对机载对地观测传递对准精度的影响。在此基础上,建立了考虑三维挠曲角的传递对准误差模型,并提出了一种基于参数识别无味Rauch-Tung-Striebel平滑器(PIURTSS)的传递对准。仿真结果表明,基于PIURTSS的传递对准方法有效提高了估计精度。
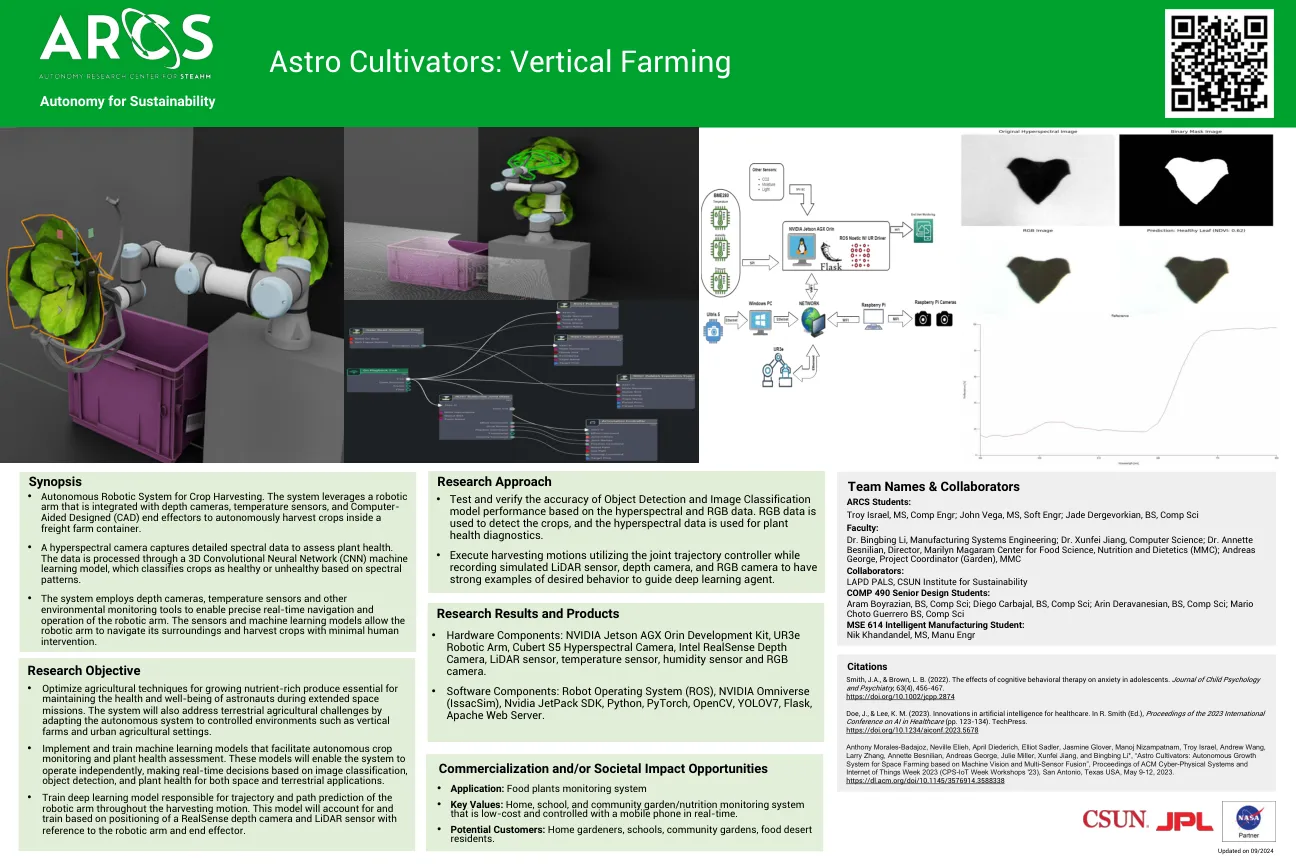
Astro耕种者:垂直农业
•优化农业技术,以生长富含养分的农产品对于在扩展太空任务期间维持宇航员的健康和福祉至关重要。该系统还将通过将自主系统调整为诸如垂直农场和城市农业环境之类的受控环境来解决地面农业挑战。•实施和训练机器学习模型,可促进自动作物监测和植物健康评估。这些模型将使系统能够独立运行,根据图像分类,对象检测和植物健康做出实时决策,以实现空间和陆地应用。•训练深度学习模型,负责在整个收获运动中对机器人组的轨迹和路径预测。该模型将根据机器人臂和最终效应器的定位来解释和训练。

三重电传操纵备用控制系统
三个备用控制系统通道的每个轴上的积分器提供电子配平、均衡和同步。当主通道接通时,备用控制系统伺服命令与这些积分器的主伺服命令同步。这些输入到备用控制系统表决器中,即使控制传感器输出和系统间控制规则存在差异,它们仍会跟踪主通道伺服命令。在从主控制系统切换到备用控制系统期间,必须将备用控制系统与主控制系统持续同步,以尽量减少控制面瞬变。如果主系统发生故障或飞行员命令脱离,就会发生切换。同步网络的带宽约为 2.5 赫兹
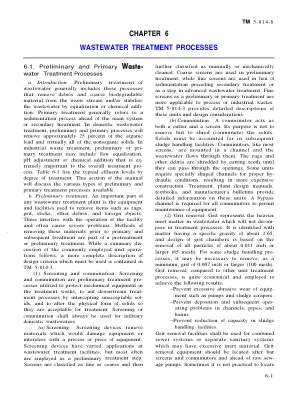
第六章 废水处理工艺
a. 简介。废水的初步处理通常包括从废水流中去除碎片和粗大可生物降解材料和/或通过均衡或化学添加来稳定废水的过程。初级处理通常是指主系统或二级处理之前的沉淀过程。在生活污水处理中,初步和初级过程将去除约 25% 的有机负荷和几乎所有的非有机固体。在工业废水处理中,初步或初级处理可能包括流量均衡、pH 调节或化学添加,这对整个处理过程极为重要。表 6-1 列出了按处理程度划分的典型流出物水平。本手册的这一部分将讨论可用的各种类型的初步和初级处理过程。
阿根廷《核安全公约》国家报告
第 3 章 — 遵守公约条款 19 3.6.第 6 条:现有核电站 19 3.6.1.总则 19 3.6.2.阿根廷现有核电站 19 3.6.3.提高安全性的行动 20 3.6.3.1.例行安全审查 20 3.6.3.1.1.运行经验 20 3.6.3.1.2.老化管理计划和活动 21 3.6.3.2.特定安全审查 21 3.6.4.改进活动 22 3.6.4.1.CNA I 改进 22 3.6.4.1.1.乏燃料干式储存设施建设 22 3.6.4.1.2.应急控制室 22 3.6.4.1.3. 应急程序审查与改进 23 3.6.4.2.CNA II 改进 23 3.6.4.2.1. 应急程序审查与改进 23 3.6.4.2.2.替代水源 23 3.6.4.2.3.将轻水从容量控制系统重新定位到主系统 24
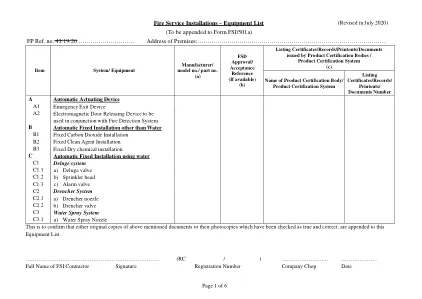
设备清单(附加到表格 FSI/501a)FP 参考...
打印件 / 文件编号 I 耐火电缆 I1 音频 / 视频警告系统 I2 自动启动装置 I3 除水以外的自动固定设施 I4 大雨系统 I5 水幕系统 I6 消防栓 / 软管卷盘系统 I7 固定泡沫系统 I8 楼梯增压 I9 带固定泵的环形主系统 I10 排烟系统 I11 街道消防栓系统 I12 细水雾系统 I13 喷水系统 I14 消防供水系统 I15 应急发电机 I16 应急照明 I17 出口标志 I18 火灾报警系统 I19 火灾探测系统 I20 消防员升降机 I21 喷水灭火系统 这确认上述文件的原件或经核对无误的复印件均已附于本设备清单。
物流支持
附带各种服务,允许购买者操作、维护和修理它。这些服务构成了后勤支持。如果我们希望供应链在第一个要素到位后就能使用,我们必须很早就对其进行研究。就像同步工程的概念一样,它已经集成了产品设计和生产工具的设计,一个强大的想法是进一步集成对主系统研究的后勤支持管理研究。综合后勤支援(ILS)是一种管理活动和技术活动的迭代方法,在规范和设计中必须考虑支持因素。这一概念诞生于大型技术系统,通常用于军事,是安全的基本要素。如今,民用技术正在超越国防技术,从而引发后勤保障标准的变化。这些限制已经变得不再那么严格,将使得物流支持方法论能够被中小企业和中小型企业所接受,物流支持作为一门综合系统工程学科,将成为决定性的竞争论据。

电动汽车应用的数字孪生平台概述 - MDPI
摘要:数字孪生 (DT) 技术已被广泛应用于电动汽车等各种领域。DT 平台实时提供物理对象的虚拟表示或高级模拟。最近,不同的研究已经将 DT 应用于电动汽车的各个方面。通常,DT 可以模拟道路上的实际车辆,以预测/优化其性能并提高车辆安全性。此外,DT 还可用于优化制造流程、实时状态监控(在所有级别和所有动力总成组件中)、能源管理优化、组件重新利用,甚至回收过程。本文概述了可用于电动汽车应用的不同 DT 平台。对基于模型和数据驱动的 DT 进行了推论比较。就可用的 DT 平台讨论了 EV 主系统。讨论了 EV 行业中使用的 DT 平台。最后,审查表明,数据驱动的 DT 优于基于模型的 DT,因为它们能够处理高复杂性的系统。

技术通告 - KR-CON
通知船东、船舶经营人、管理人、船长、船东代表和认可组织 甲板面积为 4m 2 或以上的油漆柜和易燃液体柜应配备固定灭火系统,以便船员从舱外灭火。固定灭火系统可以是以下任何一种: a) 二氧化碳系统,设计用于舱室总容积的 40%,或 b) 干粉系统,设计用于每立方米至少 0.5 千克粉末,或 c) 喷水系统,设计用于提供 5 升/m 2 /分钟的供水量。喷水系统可以连接到船舶的主系统。除上述系统外,其他系统也可以接受,只要这些系统不降低效率。对于甲板面积小于 4m 2 的油漆柜和易燃液体柜,可接受便携式二氧化碳或干粉灭火器代替固定装置。无论何种用途,油漆柜都不应位于油船上 SOLAS 规则 II-2/4.5.1.2 和 4.5.1.3 所定义的液舱和处所上方,以及化学品船上的货物区域上方(参考:MSC.1/Circ.1239 和 MSC.1/Circ.1241) 商船理事会 2012 年 12 月 6 日

高功率激光感应畸变a berrors
摘要。我们提出了一项全面的数值研究,对梁导演望远镜的主镜上的热诱导的光差。尤其是我们研究了高功率激光诱导的变形,导致的单色畸变及其对成像和激光聚焦的影响,在共享的孔径束主系统中,原代望远镜镜的性能。作为一个实际的例子,我们考虑了一个基于6×4 kW的单模高功率激光源和具有500 mm圆形透明孔径的主镜。单色畸变的详细组合及其对光学性能的影响是为硼硅酸盐和Zerodur®基材提供的,具有相同的反射涂层,用于电流激光束主管的应用。我们的分析表明,使用Athermal底物(即Zerodur®),高功率激光器可以有效地指向具有高反射性涂层(> 99.9%)的主镜子的成像降解。另一方面,只有在严格控制的环境温度下,具有相对较高的热膨胀系数(即硼硅酸盐)的底物才能有效使用。©2021光学仪器工程师协会(SPIE)[doi:10.1117/1.oe.60.6.6.065102]