XiaoMi-AI文件搜索系统
World File Search System人手

Arduino和Robotics编程概念简介
阿德里安·曼(Adrian Men)使用Arduino在编程机器人手臂上使用。Arduino是一个基于微控制器的PLAYMORM,旨在构建和编程各种电子项目。它为初学者和经验丰富的工程师提供了一个灵活和用户友好的环境,以创建Interactacte和Innovaɵve设备。Arduino的核心是其微控制器,这是单个集成电路上的小型计算机,可以编程以控制各种电子组件。

使用脑机界面如何影响人类的代理意识
脑机界面(BMI)允许个人通过控制自己的大脑活动来控制外部装置,而无需身体或肌肉运动。执行自愿运动与这些动作及其成果的代理经验(“代理感”)有关。当人们自愿控制BMI时,他们也应该体验一种代理感。但是,与正常运动相比,使用BMI采取行动会出现几种差异。特别是,BMI缺乏感觉运动反馈,可提供较低的可控性,并且与认知疲劳的增加有关。在这里,我们探讨了这些不同因素如何影响两项研究中的代理意识,在这两项研究中,参与者通过通过脑电图在线解码的运动图像来控制机器人手。我们观察到,使用BMI时缺乏感觉运动信息似乎没有影响代理意识。我们进一步观察到,对BMI的控制较低会降低代理感。最后,我们观察到,越好的参与者控制了BMI,通过身体所有权和代理分数来衡量,机器人手的拨款越大。根据BMI技术对使用假肢的患者的重要性,讨论了基于对代理意识的存在理论讨论结果。
总目 135 — 政府总部
(1) 局长办公室 ................. 19.4 20.0 20.4 22.7 (2) 创新、科技及工业 .... 179.3 221.0 195.2 251.1 (3) 效率办公室 ........................ 439.0 367.2 367.2 386.5 —————— —————— —————— ———————— 637.7‡ 608.2 582.8 660.3 (-4.2%) (+13.3%) (或较 2023-24 年度原来增加 +8.6%) ‡ 为方便比较,由於政府总部由 2022 年 7 月 1 日起进行重组,有关数字已作调整,以反映本总目下有关纲领的拨款。 财政及人手编制拨款分析

机器人手臂可以由大脑控制吗?
我们将四个微电极阵列植入了研究参与者的大脑中。微电极阵列是一种包含记录和引起神经信号的传感器的设备。神经信号是人体用来与大脑传达信息的信息。我们将两个阵列放在大脑区域,以控制手和手臂运动。这些阵列记录大脑活动以解码机器人臂的控制信号。,我们将其他两个阵列放在大脑区域,通常在触摸手时接收和解释信息。使用微小的电脉冲,这些感觉阵列会产生神经信号,这些神经信号提供有关机器人手何时与物体接触的信息。
第二次世界大战和格洛斯特医院
在 1943 年 7 月的会议上,有报告称按摩部门人手不足,应向卫生部申请组建康复中心所需的设备。此前,格罗斯特飞机公司投诉称,他们的病人一直在等待进入医务室,而且医务人员缺乏专业护理。他们向他们指出,中央医疗战争委员会已经耗尽了驻地医务人员。另外,由于战争,搬运工和家政人员也短缺。应写信给卫生部,请求增加人手并协助寻找合适的申请人;还有搬运工和家政人员。解释鉴于该地区关键的战争工人数量增加,优先治疗存在困难。

无线手部运动控制机器人夹持臂
在各种自动化行业中,无线活动是必需的,特别是在危险或危险区域的偏远地区。在许多行业中,需要处理一些非常热的工作,而人手无法做到,在这种情况下,无线操作效率更高。该项目专注于使用微控制器在 X-bee 和无线传感器网络的帮助下设计手势控制的机械臂。它由两部分组成,通过无线传感器通信系统相互连接。X-bee 将充当发射器和接收器设备系统。主要部分由装有锂离子电池、微控制器和柔性传感器的手套组成。第二部分由电机、微控制器和机器人手指组成,机械动作通过它们发生。
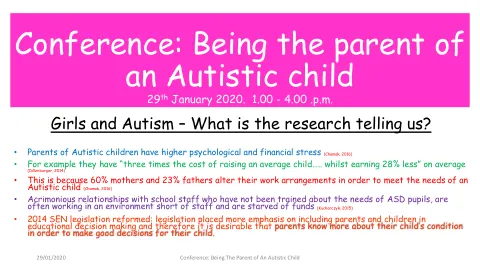
会议:作为自闭症儿童的父母
• 自闭症儿童的父母承受着更大的心理和经济压力 (Chamak, 2016) • 例如,他们“抚养一个普通孩子的成本是普通孩子的三倍……而平均收入却低 28%” (Dillenburger, 2014) • 这是因为 60% 的母亲和 23% 的父亲会改变工作安排,以满足自闭症儿童的需求 (Chamak, 2016) • 与没有接受过自闭症学生需求培训的学校工作人员关系紧张,他们经常在人手短缺和资金匮乏的环境中工作 (Kucharczyk, 2015) • 2014 年对 SEN 立法进行了改革:立法更加强调让父母和孩子参与教育决策,因此希望

3D印刷机器人软握手:朝着智能驱动和...
图2使用形状记忆合金和流体致动的软机器人抓手。(a)minir-ii。经许可复制,[25]版权所有2015,SPIE。(b)使用形状内存合金的弹性手指。经许可,[30]版权所有©2016,Mary Ann Liebert,Inc。(C)章鱼手臂启发的锥形软执行器。经许可,[31]版权所有©2020,Mary Ann Liebert,Inc。(d)经许可嵌入的软抓手嵌入了气动网络,[32]版权所有©2011 Wiley -VCH Verlag Gmbh&Co. Kgaa,Weinheim,Weinheim。(e)生物启发的机器人手。经许可复制[33]版权所有©2016 Sage Publications。
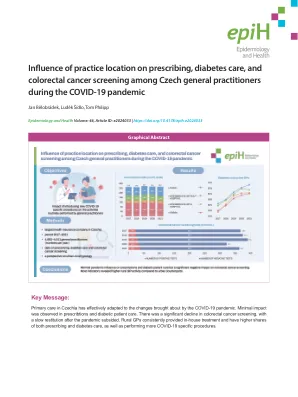
实践位置对处方,糖尿病护理的影响...
医师的不适当地理分布对农村地区的影响不成比例,长期以来一直被认为是初级保健中的全球问题[12]。这一挑战不受欧洲国家的规模或经济状况的限制[13,14]。捷克人观察到与邻国的趋势相似[15]。从2010年到2019年,捷克西亚的全科医生(GPS)的平均年龄增加了医生的平均年龄,再加上劳动力的领土不平衡和不足的续约,以及农村地区的补给率最慢[16]。这些动态可能会影响19日大流行期间的护理服务,因为农村GP的老龄化和人手不足的网络受到患者的压力增加,这是因为它们通常是其所在地可用的唯一医疗保健协调员。
面向关键系统可信 AI 应用的工程化
此次事故的起因可以追溯到 InCobot 机械臂配备的人工视觉设备的训练方法。这只重约 50 公斤的手臂配备了一个摄像头,可以观察与人类操作员共享的环境,并检测附近是否有人手。视野中的手会打断机器人的移动,机器人会等待空间空闲后再采取行动。摄像头将其视频流发送到经过机器学习训练的系统。该系统基于通用的“YOLO”(You Only Look Once)技术,该技术广泛应用于计算机视觉,这是一种经过训练可识别日常物体的神经网络,其设计者强调其通用性,并通过“迁移学习”为其提供想要识别的特定物体的互补图像,从而实现专业化。