XiaoMi-AI文件搜索系统
World File Search System任务类型

评估编程语言和任务类型对计算机科学专业学生眼动的影响
研究方法:使用眼动仪来跟踪学生程序员如何浏览和查看不同编程语言中不同类型的任务的源代码。学生在 Geany 集成开发环境(IDE,也用于他们的课程)中工作,同时在后台收集眼动数据,使他们的工作环境与之前的研究相比更加真实。每种任务类型都有 Python 和 C++ 版本,尽管针对不同的问题以避免学习效果。在屏幕的各个区域和源代码行上计算了注视次数和注视持续时间的标准眼动仪指标。这些指标的标准化版本用于跨语言和任务进行比较。

https://j https://jrat.safety.army.mil
深思熟虑的风险管理工作表 (DRAW) – 为用户提供创建自己的任务类型、子任务、危险和控制的选项,以及从针对各种预填充的任务类型和非值班活动确定的潜在子任务、危险和控制中进行选择的能力。这使用户有机会捕获他们以前可能没有考虑过的子任务、危险和控制。
适用于爱沙尼亚警察和边防警卫队 MSS 7000
操作员控制台有两个 23 英寸大触摸屏,并具有多项新功能,便于操作和准确概览情况。传感器数据、地图和报告显示在屏幕上的预指定窗口中,并位于预指定位置。有几种专用的预定义窗口布局或“配置文件”,每种都针对特定任务类型进行了优化。操作员可以随时在任务类型之间切换和/或保存个性化配置。所有传感器数据都已关联、记录,并可叠加在数字地图上。新功能包括集成的船舶数据库,可与目标关联和过滤功能交互。媒体中心便于分析和处理视频片段和相机快照。时间滑块可在回顾任务过程中情况的发展时,在时间上来回移动。
为什么你的烤面包机比控制你汽车的人工智能系统更值得信赖?
来源:Salem, Maha 等人。“您会信任(有故障的)机器人吗?错误、任务类型和个性对人机合作和信任的影响。”2015 年第 10 届 ACM/IEEE 人机交互 (HRI) 国际会议。IEEE,2015 年

dmat - 测试者的预备材料(AS:18.02.2025)
主题模块的生产基于专家的广泛科学研究,因此考试内容代表了各自的研究领域。考试任务是基于知识的,由典型的主题相关问题(输入)和相应的单选问题组成。DMAT需要基于您的学士学位和应用技能的主题知识。您可以熟悉下一节中各个任务类型的确切要求和说明。

导航,机器人技术和抓斗
On-On-On-On-Orbit服务(OO)包括一系列服务类型,以增加卫星的寿命及其性能,并确保它不会助长太空碎片的日益增长的问题。鉴于“巨型构成”的兴起,避免卫星被遗弃的人尤其重要。 在1970年代的第一个案件中,使用从地面或宇航员控制的机器人和机器人(例如在维修和升级到哈勃太空望远镜(HST)和国际空间站(ISS))中,使用了从地面或宇航员控制的机器人多次实现了OOS。 这使各种太空机构和其他组织可以为多种OOS任务类型的成熟流程和工具。鉴于“巨型构成”的兴起,避免卫星被遗弃的人尤其重要。在1970年代的第一个案件中,使用从地面或宇航员控制的机器人和机器人(例如在维修和升级到哈勃太空望远镜(HST)和国际空间站(ISS))中,使用了从地面或宇航员控制的机器人多次实现了OOS。这使各种太空机构和其他组织可以为多种OOS任务类型的成熟流程和工具。
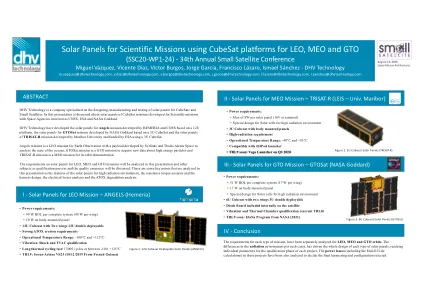
DHV 海报小型卫星 2020
针对 LEO、MEO 和 GTO 轨道,分别分析了每种任务类型的要求。每种情况下辐射环境的差异推动了每种太阳能电池板的整体设计,并达到了每个项目鉴定阶段的单独参数。还分析了这些项目中的功率损耗(包括寿命终止计算),以确定最终选择的利用和配置。

驾驶员的视线行为和扫视模式
在弯路上驾驶时执行次要任务(或与驾驶无关的任务)可能存在风险且不安全。本研究的目的是探索是否可以使用多种眼球运动测量方法来评估弯路和次要任务情况下的驾驶安全性。除了典型的静态视觉测量(例如扫视频率和持续时间)之外,我们还采用了基于马尔可夫的转换算法(转换/平稳概率、熵)来量化驾驶员的动态眼球运动模式。这些算法的评估基于一项实验(Jeong & Liu,2019)的数据,该实验涉及多种道路曲率和刺激-反应次要任务类型。在较陡的弯道中,驾驶员更有可能长时间扫描少数感兴趣的区域。在实验中,不太陡的弯道中总的低头扫视时间更长,但从长远来看,较陡的弯道中低头扫视的概率更高。感兴趣区域之间的可靠转换次数因次要任务类型而异。视觉要求不高的任务的视觉扫描模式与视觉要求高的任务一样随机。与典型的静态测量相比,基于马尔可夫的动态眼球运动测量可以更好地了解驾驶员的潜在心理过程和扫描策略。所提出的方法和结果可用于车载系统设计和进一步分析交通领域的视觉扫描模式。
驾驶员的视线行为和扫视模式
在弯路上驾驶时执行次要任务(或与驾驶无关的任务)可能存在风险且不安全。本研究的目的是探索是否可以使用多种眼球运动测量方法来评估弯路和次要任务情况下的驾驶安全性。除了典型的静态视觉测量(例如扫视频率和持续时间)之外,我们还采用了基于马尔可夫的转换算法(转换/平稳概率、熵)来量化驾驶员的动态眼球运动模式。这些算法的评估基于一项实验(Jeong & Liu,2019),该实验涉及多种道路曲率和刺激-反应次要任务类型。在较陡的弯道中,驾驶员更有可能长时间扫描少数感兴趣的区域。在实验中,不太陡的弯道中总的低头扫视时间更长,但从长远来看,较陡的弯道中低头扫视的概率更高。感兴趣区域之间的可靠转换次数因次要任务类型而异。视觉要求不高的任务的视觉扫描模式与视觉要求高的任务一样随机。与典型的静态测量相比,基于马尔可夫的动态眼球运动测量提供了更好的洞察力,可以更好地了解驾驶员的潜在心理过程和扫描策略。所提出的方法和结果可用于车载系统设计和进一步分析交通中的视觉扫描模式