XiaoMi-AI文件搜索系统
World File Search System传动装置
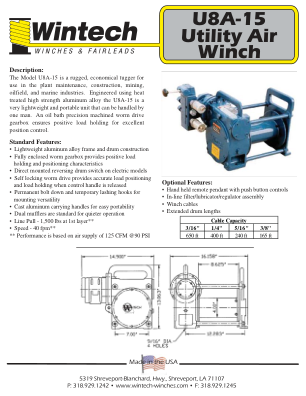
U8A-15 通用气动绞盘
标准功能:• 轻质铝合金框架和滚筒结构• 全封闭蜗轮箱提供积极的负载保持和定位特性• 电动型号上直接安装的反向滚筒开关• 自锁蜗轮传动装置在释放控制手柄时提供准确的负载定位和负载保持• 永久螺栓固定和临时绑扎钩可实现多种安装方式• 铸铝手提把手,便于携带• 双消声器是标准配置,可实现更安静的操作• 线拉力 - 第一层 1,500 磅**• 速度 - 40 fpm** ** 性能基于 125 CFM @90 PSI 的空气供应

til, i)2 , t 3 y F/A-18 中的 FCS 采用全... - DTIC
液压系统为表面执行器提供主要和备用液压。对于给定轴上的三个类似的运动反馈传感器故障,使用数字直接电气连接 (DEL) 模式完成控制,该模式提供从飞行员输入传感器到控制表面执行器的直接电气路径。如果三个数字处理器发生故障,则纵向和滚转控制通过对稳定器的备用机械模式完成。机械控制是传统的电缆、推杆和曲柄系统。在机械备用模式下,操纵杆到稳定器传动装置通过非线性连杆进行修改,以提供操纵杆力和偏转或所有飞行条件之间的所需灵敏度。在机械模式下,可通过模拟 DEL 路径控制副翼或方向舵。如果发生完全电气故障,则只能对稳定器进行机械控制。
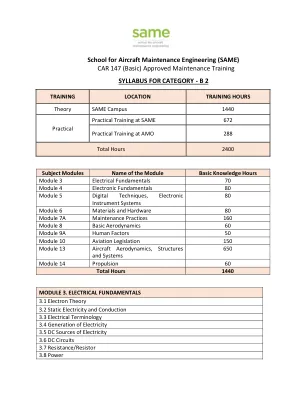
飞机维修工程学院 (SAME) CAR 147 ...
7.1 安全预防措施-飞机和车间 7.2 车间规范 7.3 工具 7.4 航空电子通用测试设备 7.5 工程图、图表和标准 7.6 配合和间隙 7.7 电线互连系统 (EWIS) 7.8 铆接 7.9 管道和软管 7.10 弹簧 7.11 轴承 7.12 传动装置 7.13 控制电缆 7.14.1 金属板 7.14.2 复合材料和非金属 7.15 焊接、钎焊、锡焊和粘合 7.16 飞机重量和平衡 7.17 飞机搬运和储存 7.18 拆卸、检查、修理和组装技术 7.19 异常事件 7.20 维护程序 模块 8. 基础空气动力学 8.1 大气物理学 8.2空气动力学 8.3 飞行理论 8.4 飞行稳定性和动力学 模块 9A. 人为因素
执行和运动系统产品指南 - Moog, Inc.
Moog 独特的运动技术产品(滑环、电机、旋转变压器、驱动器和执行器)和光纤产品提供了资本资产和工程能力,可设计、制造这些分立产品并将其集成到集成万向节机构中。在当今的商业环境中,许多企业战略都侧重于核心竞争力,让 Moog 负责将这些分立组件的设计和集成到功能齐全且经过测试的子组件中,这些子组件可直接安装到最终产品组件中。如果您的策略是将这些组件外包给按图生产,我们随时准备利用我们的资源,以便您也能实现这些目标。我们的集成组件范围从滑环和旋转变压器的简单组合到复杂的机电组件,包括电机、驱动电子设备、光纤旋转接头、液压和气动旋转接头和 RF 旋转接头。我们还提供完全集成的伺服和实用执行器,配有精密传动装置、离合器、制动器和闭环控制电子设备。
TIMKEN 工程手册
• 圆锥滚子轴承 – 圆锥滚子轴承采用独特设计,可同时承受推力和径向载荷,有单列和多列设计,装配选项丰富。我们提供丰富的圆锥滚子轴承组合,为设备制造商和操作员提供简单、可靠且成本更低的设计解决方案。 • 圆柱滚子轴承 – 与其他类型的滚子轴承相比,这种设计通常可提供给定尺寸的最高径向载荷能力。单列和双列圆柱滚子轴承是许多轧机机架、齿轮传动装置和其他辅助设备应用的理想选择,而四列圆柱滚子轴承则用于辊颈应用。Timken 提供单列和多列圆柱滚子轴承。可根据具体应用要求提供定制设计。 • 调心滚子轴承 – 调心滚子轴承提供高径向和中等推力能力以及最大静态和动态错位能力。Timken 调心滚子轴承提供高静态载荷能力和先进的几何形状,可减少摩擦和热量产生。这些轴承提供一系列尺寸稳定的配置,以适应升高的工作温度。

2023 年国际齿轮会议
从为什么到如何:现在是将可持续性从执行议程转移到现实世界的时候了 Dominik Leisinger,EMBA,合伙人兼欧洲产品卓越主管 (PERLab),A.T. Kearney (International) AG,瑞士苏黎世 需要全球标准来定义产品规格中的二氧化碳足迹 Erik Claesson,M.理学硕士,汽车部门和集团商业智能总监,Ovako AB,瑞典霍福斯 翻新履带式车辆变速箱 Dr.-Ing.Burkhard Pinnekamp,中央技术主管,Sebastian Schießler,M.工程师,维修主管,车辆移动解决方案,RENK GmbH,德国奥格斯堡 航空旅行的增加和减少排放的挑战 Dr.-Ing.David Krüger,设计工程师,R&T 项目经理,传动装置,劳斯莱斯德国有限公司,布兰肯费尔德-马洛,德国 通过两种不同的应用提高低损耗齿轮的效率 Prof. i.R.工学博士名誉博士 Bernd-Robert Höhn,慕尼黑工业大学荣誉退休教授,Michael Geitner,硕士理学硕士,研究员,机械零件研究所,齿轮研究中心 (FZG),慕尼黑工业大学工程与设计学院,加兴,德国

巴西航空工业公司 190/195 飞机的 DC-Link VSCF 交流电源系统设计
介绍了一种用于 Embraer 190/195 运输类飞机的新型 DC-Link VSCF AC-DC-AC 电力系统转换器。建议的转换器可以取代现有的基于 CSCF IDG 的传统系统。几架当代生产的飞机已经将 VSCF 作为主要或备用电源。过去,较旧的 VSCF 系统存在问题;然而,开关电源电子和数字控制器已经成熟,我们认为现在可以安全地集成并取代现有的为 CSCF AC 发电机供电的恒速液压传动装置。使用 IGBT 功率晶体管进行中等水平的功率转换和相对快速有效的切换。利用 VSCF 进行电力发电、转换、分配、保护和负载管理可提供传统 CSCF IDG 系统所不具备的灵活性、冗余性和可靠性。针对 E190/195 提出的 DC-Link VSCF 系统利用 12 脉冲整流器、降压转换器和 3-w 12 步逆变器(带 D-Y、Y-Y 和 Y-D 3-w 变压器)提供多个级别的 3-w 交流和直流电源,即 330/270/28 VDC 和 200/115/26 VAC。使用三个参考交流相位信号和高达 100 kHz 三角载波的传统双极双边载波脉宽调制可用于消除所有偶数和许多奇数超谐波。无源低通滤波器用于消除更高的谐波。RL 交流负载与
神奇科技的工作原理
Bucyrus Dragline 8750 可每周 7 天、每天 24 小时运行,每次铲运可挖掘 116 立方米的土方,相当于 58,000 个两升水瓶。平均可运行 40 年,因此在全球露天采矿作业中得到广泛使用。拖缆有 45 种不同规格,每种都有专门的应用工程师。8750 系列具有多种铲斗容量,吊臂长度可达 132.5 米。挖掘深度可达 79.8 米。它是世界上最大的移动设备之一;但当我们说移动时,我们并不是指速度快!移动拖缆并非一朝一夕之功,尤其是 Bucyrus。它的额定悬挂负载高达 344,736 公斤,其近似工作重量超过 7.5 吨。它始终由西门子交流驱动器供电。8750 系列有多种款式,其中最高端的是 8750D3。它使用无齿轮交流直接驱动进行提升和拖动 - 其优势在于效率。它允许快速填充铲斗,并且没有提升和拖动传动装置也减少了维护。电力由公用设施线路为交流驱动器供电 - 巨大的功耗意味着直接连接到电网通常是最有效的解决方案。拉铲挖掘机的工作原理 1.提升铲斗 铲斗通过强力提升钢丝绳悬挂在拉铲吊臂上的提升联轴器上。

正弦同步交流电机的数字驱动
带正弦 PWM 控制的 XtrapulsPac 全数字驱动器是伺服驱动器,可通过位置传感器控制无刷交流电机。标准控制接口可以是: - CANopen, - EtherCAT® 1, - 模拟, - 步进电机仿真, - 逻辑 I/O。但 XtrapulsPac 系列还提供更复杂的功能,例如: - 包括位置捕获的 DS402, - 主/从和电子传动装置, - 带运动排序的定位器。所有版本均标配集成安全功能安全扭矩关闭 (STO) SIL 2。XtrapulsPac 尺寸非常小,有多种设计可供选择: - 独立或多轴版本, - 标准强制风冷或推入式冷却版本。XtrapulsPac 系列驱动器完全可配置,以适应各种应用。XtrapulsPac 系列的两个驱动器版本如下所述。带有 CANopen 接口的 XtrapulsPac 版本可用于以下应用类型: 根据 DS402 协议由 CANopen 现场总线控制的轴, 作为运动序列器独立运行,通过逻辑 I/O 进行控制, 传统模拟速度驱动器,带有 +/- 10 V 命令和通过 A、B、Z 编码器信号仿真的位置输出, 步进电机仿真,带有 PULSE 和 DIR 命令信号。带有 EtherCAT® 接口的 XtrapulsPac 版本可用于以下应用类型: 根据 DS402 协议由 EtherCAT® 现场总线控制的轴, 作为运动序列器独立运行,通过逻辑 I/O 进行控制。配置和参数化软件工具 Gem Drive Studio 允许根据目标应用(模板)快速配置 XtrapulsPac 驱动器。1.2 - 说明/符合标准 1.2.1 - 一般说明

17194 联邦公报 / 第 60 卷,第 65 期 / 1995 年 4 月 5 日星期三 / 规则和条例
是 6 叶 Dowty Rotol 后掠形螺旋桨。单个控制杆控制每个螺旋桨/发动机组合。辅助动力装置 (APU) 将被安装在尾部。飞机可容纳两名飞行员、一名观察员、两名乘务员、行李架、卫生间,并设有厨房。有一个前后储物舱和一个后货舱。飞机的最大飞行高度为 31,000 英尺。Saab 2000 具有全液压驱动的电子控制方向舵,并将具有全液压驱动的电子控制升降舵作为后续设计修改。动力升降舵控制系统 (PECS) 提供左右升降舵表面的控制和动力驱动。PECS 还提供飞机稳定性增强和配平功能。拟议的升降舵系统在许多方面与方向舵设计相似,由模拟和数字电路混合组成,没有机械备份。控制柱连接到线性可变差动传感器 (LVDT)、操纵杆阻尼器、自动驾驶伺服器、带断开装置的线性弹簧,并与电子断开装置互连。连接到控制柱的位置传感器 (LVDT) 向两个电动升降舵控制单元 (PECU) 提供信号。每个 PECU 通过两个独立的伺服执行器通道 (SAC) 控制两个升降舵伺服执行器 (ESA)。每个 SAC 细分为一个主控制通道和一个监控通道。由一个 PECU 控制的四个 ESA 中的两个定位一个升降舵侧。ESA 有两种操作模式:主动和阻尼。当 PECU 的模式控制电流和液压可用时,将产生主动模式。一个主动伺服执行器足以操作升降舵表面。升降舵伺服执行器阀门和执行器柱塞位置反馈由位置传感器 (LVDT) 提供。PECU 通过配平继电器和两台数字空气数据计算机连接到一台飞行控制计算机。飞行控制计算机还向自动驾驶伺服器提供信号。操纵杆到升降舵传动装置是指示空速 (IAS) 的功能。配平和稳定性增强基于 IAS、垂直加速度和襟翼位置。操纵杆、配平和升降舵位置和状态信息被馈送到发动机