XiaoMi-AI文件搜索系统
World File Search System传递函数
印度理工学院布巴内斯瓦尔理工硕士 (PED) ...
线性稳压器的基本结构、优点和缺点;基本 DC-DC 转换器(降压、升压、降压-升压)的稳态分析;衍生 DC-DC(Cuk、SEPIC、二次)转换器的稳态分析。变压器隔离 DC-DC 转换器(正向、反激、推挽、桥式)的稳态分析;开关模式稳压器规格、框图、建模方法、假设和近似值。CCM 和 DCM 模式下硬开关转换器的动态模型和传递函数。稳压器设计示例:电流编程转换器、框图、稳定性、建模和传递函数。单相 PFC 电路。谐振转换器,软开关原理:ZVS、ZCS、ZVZCS 谐振负载转换器:变频串联和并联谐振转换器(谐振开关转换器(准谐振):半波和全波操作和控制。谐振过渡相位调制转换器,降低 VA 额定值,固定频率操作以及设备和变压器非理想性的有利用途;软开关双向 DC-DC 转换器(双有源桥):在降压模式和升压模式下进行软开关,带或不带有源钳位 PWM 转换器(带辅助开关)、ZVT/ZCT PWM 转换器:带辅助开关的隔离和非隔离拓扑;辅助谐振换向极逆变器:用于逆变器的 ZVT 和 ZCT 概念;谐振直流链路逆变器:通过辅助开关强制振荡直流链路电压。先决条件:无
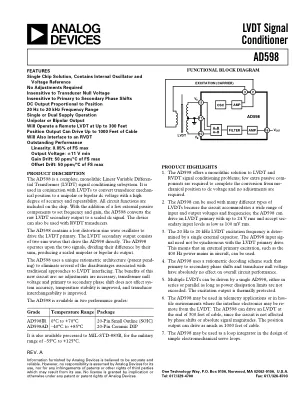
AD598 LVDT 信号调节器 - ADI 公司
注释 1 V A 和 V B 表示检测到的正弦波的平均偏差 (MAD)。注意,为了使此传递函数线性表示正位移,LVDT 的 V A 和 V B 之和必须与行程长度保持不变。请参见“工作原理”。另请参见图 7 和图 12 中的 R2。 2 从 T MIN 到 T MAX ,仅由 AD598 引起的总误差由增益误差、增益漂移和失调漂移相结合决定。例如,AD598AD 从 T MIN 到 T MAX 的最坏情况总误差计算如下:总误差 = +25 ° C 时的增益误差(± 1% 满量程)+ –40 ° C 至 +25 ° C 之间的增益漂移(FS 的 50 ppm/ ° C × +65 ° C)+ –40 ° C 至 +25 ° C 之间的失调漂移(FS 的 50 ppm/ ° C × +65 ° C)= ± 1.65% 满量程。请注意,满量程的 1000 ppm 等于满量程的 0.1%。满量程定义为最大正输出和最大负输出之间的电压差。3 仅 AD598 的非线性,以满量程的 ppm 为单位。非线性定义为 AD598 输出电压与直线的最大测量偏差。直线由产生的最大满量程负电压与产生的最大满量程正电压连接而成。4 参见传递函数。5 该偏移指的是 (V A –V B )/(V A +V B ) 输入,跨越满量程范围 ± 1。[要使 (V A –V B )/(V A +V B ) 等于 +1,V B 必须等于零伏;相应地,要使 (V A –V B )/(V A +V B ) 等于
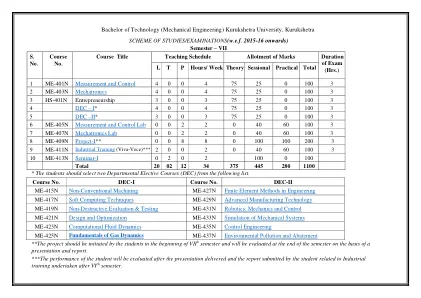
技术学士(机械工程...
控制分析:控制系统简介、分类、控制系统术语、伺服机构、过程控制和调节器、手动和自动控制系统、物理系统和数学模型、线性控制系统、拉普拉斯变换、传递函数、框图、信号流图。参考书和教科书:1.机械测量和控制 - 作者:D.S.Kumar,Metropolitan 书 2.仪器和机械测量 - 作者:A.K.Tayal,Galgotia Publ.3.测量系统应用与设计-作者 Ernest Doebelin,McGraw-Hill 4.自动控制系统-作者 S. Hasan Saeed 注意:在学期考试中,考官将总共设置 8 个问题,每个单元至少有一个问题,学生只需尝试回答 5 个问题。

FYS1210 电子学(含项目作业) 复习 2022 年 9 月 28 日 Sverre Holm
你在学什么? • 您将学习集成电路设计的基础知识,即所有集成电子元件均基于最基本的电路构建。其中包括基本的模拟CMOS电路,包括基本的电路分析和必要的信号处理工具,以及数字逻辑门的基本结构及其性能局限性的分析。 • 完成本课程后,您应该能够:• 想象和设计简单的 CMOS 集成电路。 • 分析和优化简单的 CMOS 集成电路,例如简单的放大器和逻辑门 • 在电子实验室中测量和表征简单的 CMOS 集成电路。 • 理解和使用电路分析概念,如小信号分析、增益、传递函数、带宽、门延迟、功率延迟积等。

信息物理系统接口中的混合神经网络......
人工神经网络技术旨在为未来的机器提供完全的自主性,即自主控制和决策,依靠先前的经验和分析,而无需人类的直接参与。人工神经网络是生物神经网络的模型,用于解决算法未知的问题 [1-3]。如前所述,发动机转速控制可以通过反馈控制和 PID 控制器来实现。事实上,标准 PI (D) 控制律构成了绝大多数现代电子柴油机控制器的主要线性模块。然而,控制原理是基于推进系统传递函数的标准形式,使用传递函数和热力学、物理化学过程(例如燃烧)中固有的任何非线性的线性化。

EE438:电子电路基础 - UT Direct
使用半导体器件分析和设计电子电路。二极管、双极结型晶体管和金属氧化物半导体晶体管的基本器件物理和小信号建模;工作区域和偏置;基本开关电路;单级和多级放大器设计和分析;放大器的输入和输出阻抗特性;频率响应;交流和直流耦合技术;差分放大器和输出级。实验室工作包括测试信号的生成和采集;电流、电压和阻抗测量;传递函数测量;以及频谱测量和分析。一学期每周三个讲座小时和三个实验室小时。


AN9525:HIP4080AEVAL2 的 D 类音频应用
除非要使用输入滤波,否则差分反馈放大器还应具有至少 5V/ s 的转换率。如果不这样做,反馈放大器将无法响应 MOSFET 桥式逆变器输出端的高信号转换率。全功率带宽能力应至少为 0.5MHz,以最大限度地减少输入滤波。Intersil 的 CA5470 型运算放大器满足最低要求,并带有一些输入滤波,以便不超过放大器的转换率和带宽能力。引入反馈电路的滤波器延迟必须通过误差放大器传递函数中的类似超前项(零)进行补偿。由于反馈放大器是差分放大器,因此每个求和点的阻抗必须匹配,以确保良好的共模抑制,因为共模电压将包含开关频率的大部分分量。
基于实时视觉分析的低延迟人机听觉接口
本文提出了一种视觉听觉替代方法,以帮助视障人士理解场景。我们的方法侧重于在用户附近进行人员定位,以方便在城市中行走。由于在这种情况下出于用户安全的考虑,需要实时和低延迟,因此我们提出了一种嵌入式系统。该处理基于轻量级卷积神经网络,以执行有效的 2D 人员定位。该测量结果通过相应的人员深度信息得到增强,然后通过头部相关传递函数转录为立体声信号。本文提出了一种基于 GPU 的实现,可以在 640x480 视频流上以 23 帧/秒的速度实现实时处理。我们通过实验表明,该方法可以实现实时准确的基于音频的定位。

动态配平控制概念在舰载机自动着陆中的应用
机载数字计算机的可用性使得平衡前馈和反馈自动飞机飞行路径控制系统概念的实际实施成为可能。解释了该概念并给出了模拟结果。飞机的敏感非线性力和力矩特性以表格形式收集为动态配平图,并反转以提供前馈命令信号路径,该路径与实际飞机串联,提供敏感的身份传递函数。通过完美的建模和无干扰,这将提供完美的轨迹控制。反馈回路围绕此线性路径闭合,以补偿干扰和不完善的建模。模拟结果和飞行测试表明,反馈仅需要总驱动信号的一小部分,而主要部分由前馈控制提供。