XiaoMi-AI文件搜索系统
World File Search System估计算法

电池电量电路电压曲线的实时状态电池状态估计
摘要 - 基于等效电路模型(ECM)估计开路电压(OCV)的所有电荷状态(SOC)估计算法,并使用SOC-OCV非线性关系将其转换为SOC。这些算法需要识别ECM参数和非线性SOC-OCV关系。在文献中,提出了各种技术来同时识别ECM参数。然而,SOC-OCV关系的同时同时鉴定仍然具有挑战性。本文提出了一种构建SOC-OCV关系的新技术,最终将其转换为单个参数估计问题。使用拟议的参数估计和SOC-OCV构建技术实施了Kalman过滤器,以估算电池中的SOC和相关状态。在数值模拟中,该算法证明它准确地估计了电池模型参数,并且SOC估计误差仍低于2%。我们还通过电池实验验证了所提出的算法。实验结果表明,SOC估计的误差保持在2.5%以内。

混合量子剂量恒星gan,适用于选项定价
摘要。本文在量子方法的背景下,对利用机器学习技术进行了深入的探索。我们开发并实施了一种新型的混合量子Wasserstein gan,用于将经典状态的任意分布加载到量子状态,这超出了其财务状况。特别是,如果目标分布是经典的,则我们的混合方法消除了几种潜在的不稳定性来源,并且与完全量子生成的模型相比,其性能优越。我们的QWGAN可用于捕获资产在成熟度时的概率分布,并将其转换为量子状态,因为在合成和真实数据实验上进行了反对。在选项定价上下文中,我们使用此方法提供了完整的管道,并利用迭代量子估计算法来得出预期的期权收益,从而确保与传统方法相比,误差缩放的二次增强。
![arXiv:2210.11373v2 [eess.SP] 2022 年 10 月 24 日](/simg/8\816abd8208fcdfc1a97e85f4cf500e49710f7c27.webp)
arXiv:2210.11373v2 [eess.SP] 2022 年 10 月 24 日
智能反射面 (IRS) 是一种数控超表面,包含大量无源反射元件。通过重新配置每个元件的反射系数,IRS 可以控制无线信道,以提高通信系统的覆盖范围和容量 [1–3]。然而,要通过 IRS 增强信道特性,获取准确的信道状态信息是不可避免的。因此,在本文中,我们通过利用固有信道结构来解决 IRS 辅助多输入多输出 (MIMO) 系统的上行信道估计问题。相关工作:早期关于 IRS 辅助通信系统的信道估计工作主要集中于非结构化信道模型 [4],采用最小二乘或线性最小均方误差估计器 [5]。然而,在较高频段(例如毫米波或太赫兹频段),移动站 (MS)-IRS 和 IRS-基站 (BS) 信道在角域中都表现出很强的稀疏性 [5]。这一观察结果促使 IRS 辅助信道估计算法探索信道的固有稀疏性,从而减少导频开销 [5]。最近的估计器通过考虑额外的

减轻数字和数字模拟量子计算中的噪声
噪声中型量子 (NISQ) 设备缺乏错误校正,限制了量子算法的可扩展性。在这种情况下,数模量子计算 (DAQC) 提供了一种更具弹性的替代量子计算范式,它通过将单量子位门的灵活性与模拟的稳健性相结合,表现优于数字量子计算。这项工作探讨了噪声对数字和 DAQC 范式的影响,并证明了 DAQC 在缓解错误方面的有效性。我们比较了超导处理器中各种单量子位和双量子位噪声源下的量子傅里叶变换和量子相位估计算法。DAQC 在保真度方面始终超越数字方法,尤其是随着处理器尺寸的增加。此外,零噪声外推通过减轻退相干和固有误差进一步增强了 DAQC,对于 8 量子位实现了 0.95 以上的保真度,并将计算误差降低到 10 −3 的数量级。这些结果证实了 DAQC 是 NISQ 时代量子计算的可行替代方案。
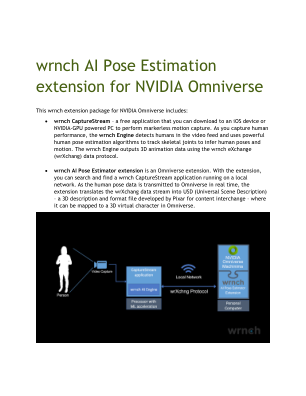
wrnch NVIDIA Omniverse 的 AI 姿势估计扩展
• wrnch CaptureStream – 一款免费应用程序,您可以将其下载到 iOS 设备或搭载 NVIDIA-GPU 的 PC 上,以执行无标记动作捕捉。在您捕捉人体动作时,wrnch 引擎会检测视频源中的人体,并使用强大的人体姿势估计算法来跟踪骨骼关节,以推断人体姿势和动作。wrnch 引擎使用 wrnch eXchange (wrXchang) 数据协议输出 3D 动画数据。• wrnch AI Pose Estimator 扩展是一款 Omniverse 扩展。使用此扩展,您可以搜索并查找在本地网络上运行的 wrnch CaptureStream 应用程序。当人体姿势数据实时传输到 Omniverse 时,该扩展会将 wrXchang 数据流转换为 USD(通用场景描述)——皮克斯为内容交换而开发的 3D 描述和格式文件,可将其映射到 Omniverse 中的 3D 虚拟角色。

模拟飞行的操作模态分析...
摘要:本研究论文的框架涉及一种称为“颤振”的现象,这是一种众所周知的动态气动弹性不稳定性,由结构振动和非定常气动力相互作用引起,振动水平可能引发较大振幅,最终导致飞机在几秒钟内发生灾难性故障。颤振预测和颤振清除是飞机设计、开发和认证过程中的主要问题。因此,认证必须保证飞机在整个飞行包线内没有颤振。在 FLEXOP(无颤振飞行包线扩展以提高经济性能)项目框架内,已经实施了一种频域中仅输出的操作模态参数估计算法,用于监测气动弹性模式的演变,从而几乎实时地监测颤振。因此,已经生成了 FLEXOP 飞机的集成气动弹性仿真模型。
紧凑型轴上光学头深度调频干涉测量中的鬼光束抑制
摘要:我们提出了一种紧凑型光学头设计,用于使用深度频率调制干涉法 (DFMI) 进行宽范围、低噪声位移传感。轴上光束拓扑结构在准单片组件中实现,依靠立方体分束器和通过垂直表面的光束传输来保持角度对准在空气或真空中运行时恒定,这会导致产生鬼光束,从而限制相位读出线性。我们研究了将这些光束耦合到 DFMI 的非线性相位读出方案中,并对相位估计算法进行了调整以减少这种影响。这是通过平衡检测和深度频率调制干涉法中具有不同相对时间延迟的拍频信号的固有正交性的组合来实现的,这是异差、正交或同差干涉法所不具备的独特功能。
了解量子技术 2024
算法:改进了数据加载部分,在数据准备技术中添加了块编码,并在算法中添加了半经典 QFT。改进了 Shor 整数分解算法和 QPE 算法的解释。添加了一个表格,总结了 Shor 整数分解、Shor 离散对数和量子相位估计算法之间的差异。更新了 NISQ 部分,考虑到 IBM 和 Quantinuum QPU 在量子比特保真度方面的最新进展。更好地解释了 DAQC 计算范式。添加了一个图表,定位了解决组合优化问题的经典和量子方法。在复杂性类部分中添加了一些复杂性类:FP、PostBQP。FPTAS、PTAS、APX 和 NPO。更新了一些图表并创建了新的图表。
创新型直升机飞行噪音监测系统...
摘要:本文旨在全面阐述一种新的旋翼机噪音消除方法,特别是在飞行器接近地面且声学影响较大的终端程序期间。该方法致力于开发用于实时、飞行中监测发射噪音的技术和工具。声辐射的影响以简明、实用的形式呈现在一种新的驾驶舱仪表——飞行员声学指示器 (PAI) 上,用于执行更安静的操作。PAI 基于预先计算的声学数据的协同组合,这些数据与创新的非接触式测量系统收集的数据一起用于噪声估计算法,该系统能够获取主旋翼叶片运动。本文报告了当前在非稳定和准稳定气动声学预测以及翼尖-航向-平面攻角和推力系数观测方面的研究。本文讨论了新方法的结果以及 PAI 设计和开发过程的主要特点。

与人工智能共舞 - 一个互动的舞蹈学习平台
表 1 显示了基于某些参数的不同姿势估计技术之间的比较。我们可以看到,OpenPose 算法获得的准确度最高,但由于其 CNN 模型较重,获得的 fps 相当低,而对于 Posenet 算法,我们获得了良好的 fps,因为它 x 没有 x 多阶段架构,x 还使用轻量级 x CNN 模型。BlazePose 是另一种很好的姿势估计算法,因为它在姿势估计期间获得了准确度和 fps 的良好平衡。我们决定在这三个中选择 Blazepose,因为 Openpose 没有给我们提供良好的 fps,而 Posenet 仅考虑 17 个身体关键点进行检测,而 Blazepose 有 33 个,并且在我们的应用中,我们需要一种可以为单人姿势估计提供良好结果的算法,Blazepose 主要关注这一点,它还给出规范化坐标作为输出,而在其他算法中,我们明确需要对它们进行规范化以进行进一步处理。