XiaoMi-AI文件搜索系统
World File Search System位移
![arXiv:1407.3493v2 [physical.atom-ph] 2015 年 2 月 9 日](/simg/7\7840d18dae19d476ebeb854c19dcddca977d3302.webp)
arXiv:1407.3493v2 [physical.atom-ph] 2015 年 2 月 9 日
六、中性原子集合光学频率标准 36 A. 原子候选者:碱土元素 36 B. 碱土原子的激光冷却和俘获 36 C. 自由空间标准 39 D. 光学晶格中的强原子限制 39 1. 分辨良好的边带和 Lamb-Dicke 区域的光谱 39 2. 神奇波长 41 3. 晶格限制原子的光谱 43 4. 超高分辨率光谱 44 E. 晶格钟中的系统效应 45 1. 光学晶格斯塔克位移 45 2. 塞曼位移 46 3. 黑体辐射的斯塔克位移 47 4. 冷碰撞位移 49 5. 询问激光的斯塔克位移 50 6. 多普勒效应 50 7. 直流斯塔克位移 51 8. 其他效应 51 F. 基于费米子或玻色子的光学晶格钟 51 G. 晶格钟性能 53 1. 时钟稳定性 53 2. 系统评估 55



正交 - 酶驱动的tnimer-for-dna-strand- ...
在这里,我们展示了一种策略,以合理地编程toehold介导的DNA链置换反应的延迟发作。该方法基于阻断链,通过与靶DNA的toehold结构域结合来有效抑制链位移。特定的阻滞剂链的酶促降解随后实现了链位移反应。阻滞剂酶促降解的动力学控制了链位移反应开始的时间。通过改变阻滞剂链的浓度和酶的浓度,我们表明我们可以很好地调整并调节链位移反应的延迟开始。另外,我们表明该策略是用途广泛的,可以通过不同的酶正交控制每个酶,每个酶都专门针对不同的阻滞剂链。我们使用RNase H以及两个DNA修复酶FPG和UDG以及相应的阻滞剂设计并建立了三个不同的延迟链位移反应。可以使用动力学建模可以方便地预测所达到的时间延迟,而无需不需要泄漏,可以通过高灵活性进行编程。最后,我们表明,延迟的链位移反应可以耦合到下游过程,并用于控制从DNA纳米电视中的配体释放以及DNA Aptamer抑制蛋白质。

皮级原子位移对折射率的巨大调节
结果表明,结构无序(以各向异性、皮级原子位移的形式)会调节折射率张量,并导致在准一维六方硫族化物 BaTiS 3 中观察到巨大的光学各向异性。单晶 X 射线衍射研究表明,沿 c 轴相邻 TiS 6 链内存在 Ti 原子的反极性位移,以及 a – b 平面上的三重退化 Ti 位移。47/49 Ti 固态 NMR 为这些 Ti 位移提供了额外的证据,这些 Ti 位移呈三角 NMR 线形,是由 Ti 原子周围低对称性局部环境引起的。扫描透射电子显微镜用于直接观察全局无序的 Ti a–b 平面位移,并发现它们在几个晶胞上局部有序。第一性原理计算表明,Ti a – b 平面位移选择性地降低了沿 ab 平面的折射率,而对沿链方向的折射率影响最小,从而导致光学各向异性大幅增强。通过展示具有皮尺度位移的结构无序与 BaTiS 3 中的光学响应之间的紧密联系,本研究为设计具有高折射率和大光学各向异性和非线性等功能的光学材料开辟了一条途径。
生物闩锁介导的可调、简化模型...
作者:A Cook · 2020 · 被引用 4 次 — LaMSA 系统加载至弹簧位移 ymax,该位移由加载电机和弹簧力相等计算得出。B-C 解锁和解锁过程中的动态...
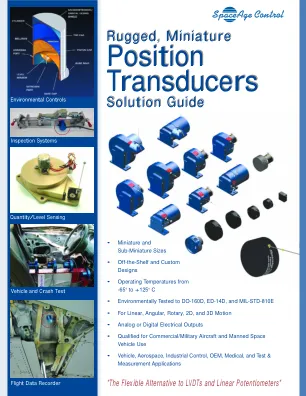
坚固,微型 - 位置传感器 - 间距控制
位置传感器将机械运动转换为可计量、记录或传输的电信号。SpaceAge Control 位置传感器由缠绕在螺纹滚筒上的不锈钢位移电缆组成,该电缆直接耦合到精密、长寿命的传感器。在操作上,位置传感器安装在固定位置,延长电缆连接到移动物体。延长电缆和移动物体的运动轴彼此对齐。当发生运动时,位移电缆会伸出和缩回。内部工程弹簧保持位移电缆上的张力。螺纹滚筒旋转精密、长寿命的传感器,该传感器产生与位移电缆行程成比例的电输出。测量输出以反映移动物体的位置、方向或运动速率。

定义明确的合成共聚物与垂直醛形成生物相容性应变水凝胶,并启用竞争性配体位移
图2。PSM-CO -OMAM(共co-)聚合物的结构和表征。(a)聚合物结构显示醛平衡及其乙酰形式。(b)1 H NMR(700 MHz,d 2 O)纯化的PSM- CO-OMAM共聚物(S25 – S75)和峰分配的聚(3-磺胺甲基丙烯酸酯)均聚合物(S100)的光谱。请注意,游离醛状态(a,b,c)及其相关的乙酰形式(a*,b*,c*)的存在。在图S14中,将S25频谱作为代表性示例包括在表示a:b:c的积分比为≈1:1:1:a+a*:b+b*:c+c*是≈1:2:2。(c)纯化的S25 – S100的ATR-FTIR光谱。酰胺I和醛羧基拉伸(1637 cm -1),酰胺II带(1537 cm -1),磺酸盐(1041 cm -1)和酯(1714 cm -1)峰用点缀的线表示。S100光谱中带有星号(*)的峰与指定的酰胺I和醛峰(1648 cm -1 vs 1637 cm -1)不一致。完整的ATR-FTIR光谱可以在图S15中找到。
振动测量.pdf - IET 实验室
位移不是振动的重要特性。振动机械部件将以与扬声器非常相似的方式辐射声音。通常,辐射部件(对应于扬声器的锥体)和其旁边的空气的速度相同,并且,如果从部件前部到后部的距离大于空气中声音波长的一半,则空气中的实际声压将与振动速度成正比。振动表面辐射的声能是速度平方和空气负载的电阻分量的乘积。在这些条件下,特别是在噪声很重要的情况下,最重要的是振动部件的速度而不是其位移。速度是位移随时间的变化率

人类大脑粘弹性特性的标准空间图谱
图 1 MRE 成像和分析程序概述。第一步,通过气动驱动系统(Resoundant;明尼苏达州罗切斯特)将 50 Hz 的剪切波引入大脑。使用嵌入在 MRE 螺旋序列中的运动编码梯度捕获由此产生的组织变形,并沿三个独立轴(前 - 后、右 - 左和上 - 下)捕获位移数据。位移数据连同二元脑掩模一起提供给非线性算法,该算法将组织建模为异质粘弹性材料。子区域优化程序用于迭代更新有限元计算模型中的属性描述,以最小化模型位移和测量位移数据之间的差异。最后,将复杂剪切模量图转换为剪切刚度 μ = 2 j G * j 2/( G ' + j G * j ) 和阻尼比 ξ = G 00 /2 G 0 。提供特定主题的 T1 加权 MPRAGE 和 MRE T2 幅度图像,以说明空间标准化程序所需的图像