XiaoMi-AI文件搜索系统
World File Search System位置信息

通过使用相对位置信息在玩家之间的相对位置信息
摘要:加强学习的最新进步使得培养足球代理人,以模仿人类球员的行为。但是,现有方法成功复制现实的玩家行为仍然具有挑战性。实际上,代理商表现出诸如在球周围聚集或过早射击之类的行为。此问题的一个原因在于奖励功能总是为某些行动分配巨大的奖励,例如得分目标,无论情况如何,这种情况都会使代理人偏向高奖励行动。在这项研究中,我们将相对位置奖励和拍摄的位置重量纳入用于增强学习的奖励功能中。相对位置奖励,源自球员,球和目标的位置,是使用逆强化学习在真正的足球游戏数据集中估算的。拍摄的位置重量类似地基于这些游戏中观察到的实际射击位置。通过在真正的足球游戏中获得的数据集中进行实验,我们证明了相对位置奖励有助于使代理商的行为与人类玩家的行为更加紧密地保持一致。

采用传感器融合技术确定飞机姿态和位置信息
图 3.11:GPS 与垂直陀螺仪姿态.................................................................................... 41 图 3.12:GPS 与垂直陀螺仪姿态.................................................................................... 41 图 3.13:卡尔曼滤波器序列...................................................................................... 42 图 3.14:卡尔曼滤波器状态和协方差矩阵的进展....................................................... 46 图 3.15:扩展卡尔曼滤波器 (EKF) 序列.................................................................... 47 图 4.1:YF-22 机载计算机 2.................................................................................... 52 图 4.2:NovAtel GPS.................................................................................................... 53 图 4.3:Goodrich Systems 垂直陀螺仪.................................................................... 54 图 4.4:IMU 与 GPS 测量获取率............................................................................. 55 图 4.5:GPS 位置(放大)..................................................................................... 57 图 4.6:GPS 位置 -瞬时信号丢失................................................................................ 57 图 4.7:方差计算的稳定状态时间段.................................................... 59 图 4.8:GPS 辅助 INS/垂直陀螺仪框图.................................................... 61 图 4.9:滤波处理序列....................................
利用位置信息改进基于块的卷积神经网络进行 MRI 脑肿瘤分割
手动脑肿瘤注释过程耗时耗力,因此,对自动化、精准的脑肿瘤分割工具的需求十分巨大。在本文中,我们介绍了一种新方法,将位置信息与最先进的基于块的神经网络相结合,用于脑肿瘤分割。这是基于以下观察结果:病变并非均匀分布在不同的脑分区区域中,而局部敏感的分割可能会获得更好的分割精度。为此,我们使用蒙特利尔神经研究所 (MNI) 空间中现有的脑分区图谱,并将该图谱映射到单个受试者数据。受试者数据空间中的映射图谱与结构磁共振 (MR) 成像数据相结合,并训练基于块的神经网络(包括 3D U-Net 和 DeepMedic)对不同的脑病变进行分类。在提出的两级集成方法中,训练了多个最先进的神经网络并将其与 XGBoost 融合相结合。第一级通过不同的种子初始化来降低同一类型模型的不确定性,第二级利用不同类型的神经网络模型的优势。所提出的位置信息融合方法提高了包括 3D U-Net 和 DeepMedic 在内的最先进网络的分割性能。与 BraTS 2017 中最先进的网络相比,我们提出的集成还实现了更好的分割性能,并与 BraTS 2018 中最先进的网络相媲美。在公共多模态脑肿瘤分割 (BraTS) 基准上提供了详细结果。
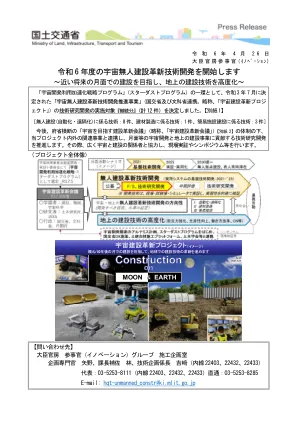
我们将于2024财年开始开发创新型太空无人建造技术。
[实施图像] 为了控制工程机械实现无人施工,必须获取机械的准确位置信息。为了在没有定位卫星系统的月球环境下获取位置信息,我们旨在通过整合利用环境信息的LiDAR-SLAM技术和利用人工特征的地标SLAM技术(混合SLAM),开发能够适应月球表面等特殊环境的自动驾驶技术。
飞行员操作手册;ICON A5;ICA012347 发行 A3
ASTM 标准 ..................................0-2 联系信息 .................................0-3 数据位置信息。............................0-3 手册修订。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。0-3 符号。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。0-4
7. 有效版本 2024 年 10 月 1 日至 2025 年 1 月 16 日
本条件旨在确保公共通信服务在任何时候(包括发生灾难或灾难性网络故障时)尽可能充分可用,并保证不间断地联系应急组织。它要求呼叫服务提供商确保可以免费拨打应急组织电话,并在技术可行的情况下向应急组织提供呼叫者位置信息。它还包括与 VoIP 外拨呼叫服务提供商有关的具体规则,旨在确保这些服务的用户了解拨打应急组织电话的任何潜在限制,并确保尽可能向应急组织提供准确且最新的呼叫者位置信息。