XiaoMi-AI文件搜索系统
World File Search System低轨

未来太空生态系统:在轨运行、新系统概念
欧盟委员会与欧洲利益相关方一道,在其战略研究与创新议程 (SRIA) 中确定了空间研究与创新 2 的关键领域,考虑到 H2020 活动,也针对未来空间生态系统:在轨运行、新系统概念(SRIA 第 3.2 节)。目前,欧盟委员会正在与欧洲利益相关方一道,根据 SRIA 制定高级路线图 3,这些路线图应作为进一步研究与创新规划的指导,以促进在轨服务/组装/制造 (OSAM)、回收、空间物流、功能构建模块以及设计所需的工具、新的生产和测试方法。机器人技术,加上采用新的工业流程、模块化和可维护的航天器设计、架构和方法、数字化和人工智能,是向智能空间系统转变的核心。这些将改变卫星/空间系统

空间机器人在轨装配技术综述
大型结构建造是未来太空探索的主要发展趋势之一,例如大型空间站、大型空间太阳能发电站、大型空间望远镜等,充分利用空间机器人实现空间结构自主装配是航天工业的重要发展趋势之一。考虑到在轨装配是解决大型空间结构建造问题的有效方法,有必要推动和促进空间机器人在轨装配技术的研究。因此,本文对近几十年来空间机器人技术的发展现状以及相关的空间机器人在轨装配技术进行了综述。首先,基于空间机器人运动规划和装配序列规划,介绍了空间机器人规划算法的发展。针对空间机器人装配任务,综述了空间机器人装配方法。从控制角度,综述了如何解决在轨装配的振动抑制和柔顺装配,为空间机器人对空间大型结构的自主智能装配提供参考。为了在地面模拟空间组装场景,本文介绍了地面验证试验的发展情况,为空间在轨组装技术的有效验证提供了思路。综上所述,虽然过去的研究已经较好地解决了其中一些问题,但未来仍需要进一步的研究。最后,展望了空间机械在轨组装未来的研究方向。

使用轨内维修建立可持续的太空经济
摘要。仅设计用于维护的航天器,并且通常仅限于哈勃望远镜或国际空间站。建立可持续的太空活动需要维修空间资产,以实现更长的寿命,修复或重新利用。目前的操作中目前的卫星尚未为此签署,但是自2020年以来,在GEO中已经证明了未准备的轨内服务。它们基于两种关键技术:Rendez-Vous&Docking。为了在可持续的轨内服务市场中改变一步,面临的挑战是开发更有效的系统,更自主和依靠很少的传感器。
空间机器人在轨装配技术综述
大型结构建造是未来太空探索的主要发展趋势之一,例如大型空间站、大型空间太阳能发电站、大型空间望远镜等,充分利用空间机器人实现空间结构自主装配是航天工业的重要发展趋势之一。考虑到在轨装配是解决大型空间结构建造问题的有效方法,有必要推动和促进空间机器人在轨装配技术的研究。因此,本文对近几十年来空间机器人技术的发展现状以及相关的空间机器人在轨装配技术进行了综述。首先,基于空间机器人运动规划和装配序列规划,介绍了空间机器人规划算法的发展。针对空间机器人装配任务,综述了空间机器人装配方法。从控制角度,综述了如何解决在轨装配的振动抑制和柔顺装配,为空间机器人对空间大型结构的自主智能装配提供参考。为了在地面模拟空间组装场景,本文介绍了地面验证试验的发展情况,为空间在轨组装技术的有效验证提供了思路。综上所述,虽然过去的研究已经较好地解决了其中一些问题,但未来仍需要进一步的研究。最后,展望了空间机械在轨组装未来的研究方向。

阿尔及利亚首颗在轨微型卫星 Alsat-1 轨道模拟器
阿尔及利亚通过国家空间技术中心 (CNTS) 选择通过技术转让来发展其技术能力,制定战略来实施空间技术并满足其已知和潜在的需求。Alsat-1 项目将提高用户群体对空间技术益处的认识和理解。阿尔及利亚的第一颗卫星 Alsal-1 是由英国萨里卫星技术有限公司 (SSTL) 与 CNTS 合作设计和建造的。 Alsat-1 轨道的模拟在 C++ 代码和 MATLAB/Simulink 环境中运行,通过在相应时刻重新显示位置和速度矢量。所开发的函数的输出参数在包含开普勒元素的矢量中定义;以及使用 Star! 和 End
6G卫星前体 - 打开轨内6G实验室
7C.082 5G连接的汽车7C.084 5G汽车天线原型和演示Q3 2023 5G.07 - 5G HUB用于空气验证Q2 2023 7C.086终端示范5G 5G NEW - NR-5G NER-drive Drifornwore(N)卫星验证验证任务3E.019超过5G(B5G)端到端解决方案和服务的开放可重编程的可隔离空间基础设施床Q3 2023 3E.011 6G卫星前体Q1 2023 5G.09 - 5G.09 - 5G超过5G(B5G)和6G 3A.184超过5G(B5G)和6G(B5G)和6G(B5G)卫星Q2 2023 3A.185超出5G(B5G)和6G 3D网络的光谱共享技术

使用商用星跟踪器探测在轨碎片的可行性分析
美国太空监视网络 (SSN) 目前跟踪低地球轨道 (LEO) 上的 23,000 多个驻留空间物体 (RSO)。SSN 使用地面雷达和光学方法,这些方法易受大气、天气和光照条件变化的影响。这些障碍将监视能力限制在特征长度大于 10 厘米的物体上。因此,数十万个较小的 LEO RSO 仍未被跟踪,从而降低了整体太空态势感知能力。先前的研究已经证明了使用太空商用星跟踪器 (CST) 探测和跟踪特征长度大于 10 厘米的物体的可行性。我们在本文中提出的分析表明,CST 也可用于探测尺寸小于 10 厘米的碎片颗粒。我们将粒子建模为具有零相位角和 10% 反射率的朗伯球。碎片颗粒的视在目视星等表示为颗粒大小和 RSO-CST 距离的函数,并与各种 CST 的灵敏度水平进行比较。我们发现,在适当照明的情况下,一些 CST 甚至可以在数十公里的距离内探测到特征长度在 1 厘米到 10 厘米之间的碎片。更灵敏的 CST 可以识别数百公里外该尺度较大端(即 10 厘米)的 RSO;或者,它们可以在更近的距离内追踪小于 1 厘米的物体。
英国空间在轨服务和制造优先事项文件
为地球制造:太空是一个独特的环境。它可以用来制造对环境有害、难以或不可能在地球上制造的材料,过去 50 年来,从天空实验室到国际空间站的实验都成功证明了这一点。利用自然真空和微重力环境,可以制造用于各种应用的材料和结构,包括无缺陷半导体、药物和超级合金。从研究到制造水平的扩大需要新技术来自动化航天器的制造过程并降低从太空返回的成本,而目前价格尚未出现与发射成本趋势相当的下降。
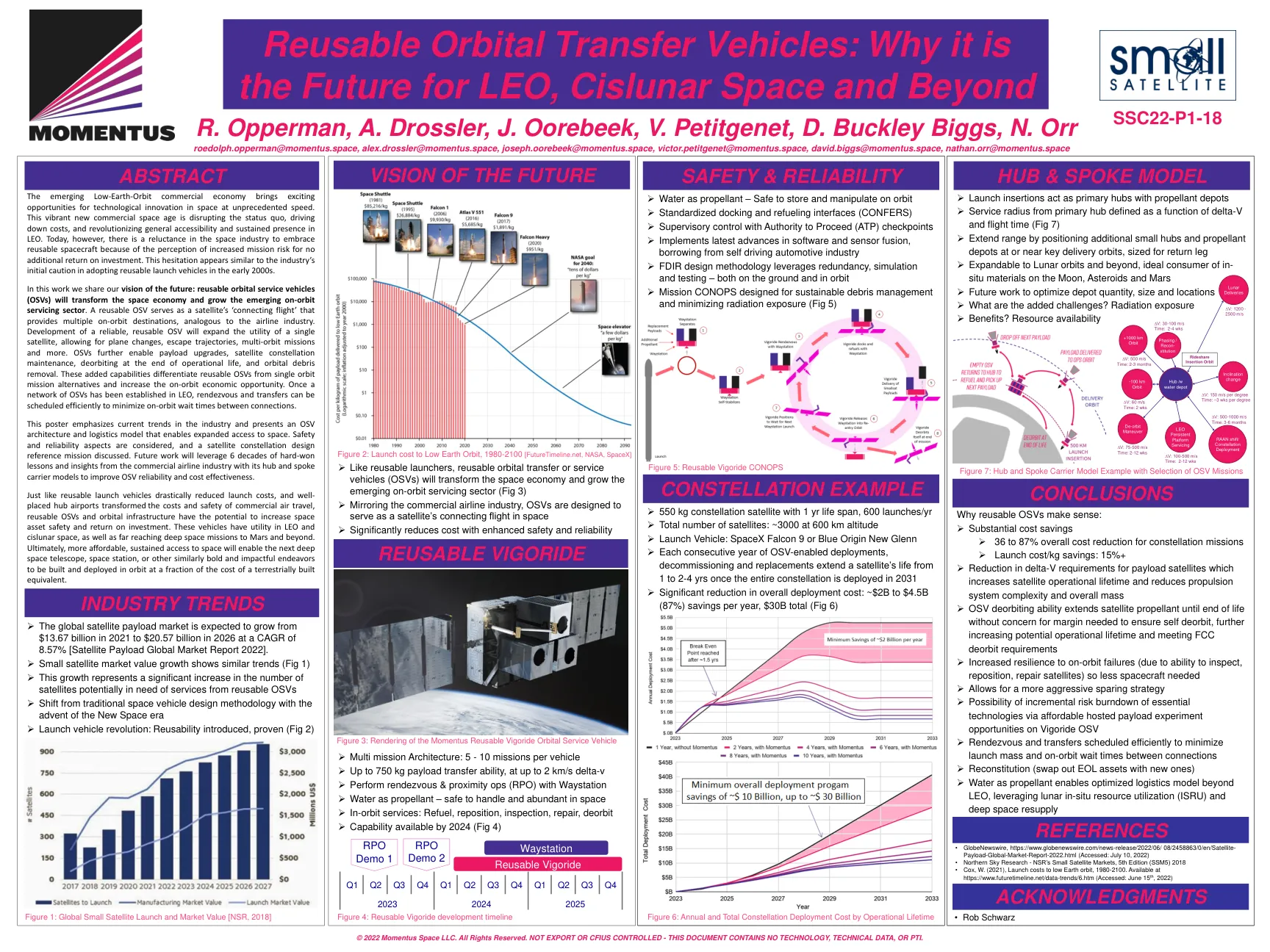
可重复使用的轨道转移飞行器
在这项工作中,我们分享了我们对未来的愿景:可重复使用的轨道服务飞行器(OSV)将改变太空经济并发展新兴的在轨服务行业。可重复使用的 OSV 充当卫星的“中转航班”,提供多个在轨目的地,类似于航空业。开发可靠的可重复使用的 OSV 将扩大单颗卫星的效用,允许更换平面、逃逸轨迹、多轨道任务等。OSV 进一步实现有效载荷升级、卫星星座维护、使用寿命结束时脱轨以及轨道碎片清除。这些附加功能将可重复使用的 OSV 与单轨道任务替代方案区分开来,并增加了在轨经济机会。一旦在低地球轨道建立了 OSV 网络,就可以有效地安排会合和转移,以最大限度地减少连接之间的在轨等待时间。

为低风险或低需求人群提供服务的策略
该项目由司法援助局颁发的拨款编号 2019-DC-BX-K012 资助。司法援助局是司法部司法计划办公室的一个组成部分,该办公室还包括司法统计局、国家司法研究所、青少年司法和犯罪预防办公室、犯罪受害者办公室和 SMART 办公室。