XiaoMi-AI文件搜索系统
World File Search System作进

X-56A 飞行试验包络进近... - NATO STO
• GCS 监控器中的工程学科用于确保安全性和数据质量 • 定性地观察与飞行前模拟预测之间的差异 • 对闭环稳定性和振动阻尼进行实时评估 • 观察执行器速率限制和饱和度,这些因素会有效地打开环路并导致失控 • 监控由执行器死区引起的极限环振荡 (LCO),将其作为不稳定性的指标 • 飞行后数据分析
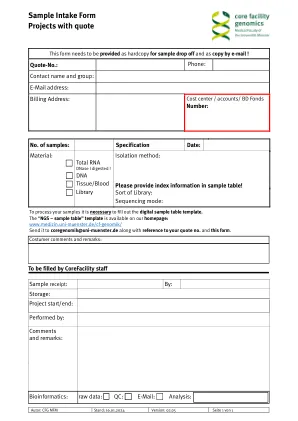
带有报价的样本进气表项目
要处理样品,有必要填写数字样本表模板。“ ngs - 示例表”模板可在我们的主页上找到:www.medizin.uni-muenster.de/cf-genomik/将其发送到coregenomik@uni-muenster.de,并引用您的报价。和此形式。

使用人工智能 (AI) 从操作声音中检测异常
最近,我们越来越多地听到人工智能这个词。因为人工智能的研究已经进行了很多年,但并不总是取得成功,但随着近年来深度学习的出现,终于有可能使这成为现实。人工智能研究,即利用机器执行人类智力活动的实践,几乎与计算机的出现同时开始,并且自 1956 年达特茅斯会议以来一直在认真开展。最初人们认为这可以借助计算机的强大计算能力来实现,但是并没有成功。此外,人们还研究是否可以通过对一切进行编程来实现智能,但所得到的结果还远远称不上智能。这个时代的技术仍在今天的智能扬声器和 Pepper 机器人中使用,但在与它们短暂交谈之后,人们很快就会厌倦它们,并且在很多情况下停止使用它们。基于这些经验的反思,通过模拟控制人类智力的大脑的功能来实现人工智能的想法诞生,并提出了神经网络和模糊概念。我当时也参与了这些领域的研究,虽然也取得了一些成果,但很多成果很难称得上是突破性的。深度学习就是在这样的历史背景下诞生的。这本质上是一个多层神经网络,研究发现,与当时使用的三到五层的神经网络相比,多层可以显著提高性能。多层化之所以困难,主要原因是当时计算机的计算能力较差,无法在实际的计算时间内完成多层神经网络所需要的大量计算。多层神经网络中的计算涉及大量的乘法和加法运算,但大多数运算都是独立的,没有顺序依赖性,从而可以实现并行运算。因此,利用近年来个人计算机中搭载的具有大量计算单元的GPU,以实用的计算时间和成本进行计算是高效的,这也是深度学习在许多应用领域得到应用的原因之一。另外,由于优化深度学习的机器学习部分是类似旅行商问题的优化问题,因此也可以使用量子计算机。因此,基于深度学习的人工智能现在可以以实际的计算时间和成本实现,并且正在用于各种应用领域。人工智能的应用开始出现在广泛的领域,包括超越人类大师的围棋和将棋程序、自动驾驶汽车、图像识别、语音识别、翻译以及文本、音乐和绘画的创作。这使得机器能够在很多领域做出智能决策,这在过去并不是完全可能的。

参谋长联席会议主席视察第21特种作战中队
(图2)7月19日,美国参谋长联席会议主席、空军上将查尔斯·Q·布朗(左)和夫人沙伦·布朗在日本横田空军基地的飞行线上迎接第353特种作战联队、第21特种作战中队和第21特种作战飞机维修中队的领导。 布朗参观了横田空军基地的第 374 空运中队、第 21 特种作战中队、第 21 特种作战飞机维修中队和第 353 特种作战中队,并表彰了这些空军官兵。

基于视觉的先进精密进近和着陆...
先进空中机动 (AAM) 飞机需要感知系统,以便在城市、郊区、农村和区域环境中实现精确进近和着陆系统 (PALS)。目前批准用于自动进近和着陆的最先进的方法将难以用于支持 AAM 操作概念。但是,来自其他应用和低 TRL 研究的技术和系统使用视觉、红外、雷达和 GPS 方法为 AAM 飞机进近和着陆提供基线感知和传感要求。本文重点介绍基于视觉的 PAL,以演示闭环基线控制器,同时遵守联邦航空管理局的要求和规定。共面算法确定姿势估计,并将其输入到扩展卡尔曼滤波器中。将 IMU 与视觉相结合,为 GPS 拒绝的环境创建传感器融合导航解决方案。状态估计会导致下滑道和定位器误差计算,这对于设计和推导 AAM PALS 的制导律和控制律至关重要。 IMU 和视觉导航解决方案为 AAM PALS 提供了有希望的模拟结果,更高保真度的模拟将包括计算机图形渲染和特征对应。

波音 737-800 飞机进近时坠毁
简介 2009 年 2 月 25 日,土耳其航空公司运营的一架波音 737-800(航班 TK1951)从土耳其伊斯坦布尔阿塔图尔克机场飞往阿姆斯特丹史基浦机场。由于这是一次“监督下的航线飞行”,驾驶舱内有三名机组人员,分别是机长(兼任教练)、副驾驶(必须在航线上积累经验,因此在监督下飞行)和观察飞行的安全飞行员。机上还有四名机组人员和 128 名乘客。在接近史基浦机场 18 号右跑道(18R)时,飞机在距离跑道入口约 1.5 公里处坠毁在一片田地中。此次事故造成包括三名飞行员在内的四名机组人员和五名乘客丧生,另有三名机组人员和 117 名乘客受伤。
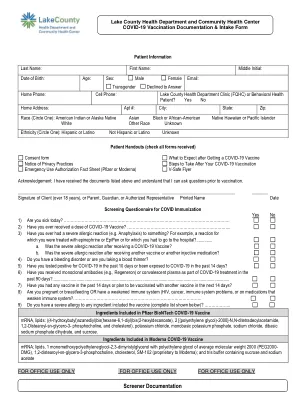
COVID-19疫苗接种文档和进气表
剂量:0.3毫升辉瑞/Biontech Covid-19疫苗0.5 ml Moderna Covid-19疫苗批次:______________________________________。Date: ________ Record: Vaccination record card provided to Patient Vaccinator's Comments (use additional space on back of form if necessary): ______________________________________________ ___________________________________________________________________________________________________________ ___________________________________________________________________________________________________________ ___________________________________________________________________________________________________________ ___________________________________________________ ______________________________________________ Vaccinator Signature Vaccinator Printed Name and Title Date Date Entered into ICARE:_______________________ Date Uploaded into AllVax:_______________ ICARE PID:____________________________
使用氢燃料电池进行长时储能
[1] P. Denholm,《可再生能源》130(2019 年)388-399 [2] MR Shaner、SJ Davis、NS Lewis、K. Calderia。“地球物理对美国太阳能和风能可靠性的限制。”《能源与环境科学》11(2018 年)914-925 [3] B. Pierpont。“注意存储缺口:我们需要多少灵活性来实现高可再生能源电网?”Green Tech Media,2017 年 6 月。 [4] B. Pierpont、D. Nelson、A. Goggins、D. Posner。“灵活性:通往低碳、低成本电网的道路。”《气候政策倡议》,2017 年 4 月。 [5] 氢能委员会,2020 年。“通往氢能竞争力的道路:成本视角。”

室内路径的多目标进化性人工电位
摘要:路径计划对于机器人技术至关重要,使机器人可以从其当前位置到目标位置找到无碰撞的路线。人造潜力领域(APF)方法利用有吸引力的排斥性领域来指导机器人朝目标,同时避免障碍物。但是,由于局部最小值,常规APF的排斥潜在方程可能会产生次优的结果。为了解决这个问题,引入了一种称为多目标进化性人工电位场(MOE-APF)的新颖方法。MOE-APF修改了排斥电势方程,并采用膜计算和遗传算法(GA)来优化一组新的APF参数。健身函数考虑了多个目标:路径长度,平滑度,成功率和安全性。与最新方法的比较称为膜进化性人工电位场(MEMEAPF)表明,MOE-APF显着提高了各种环境之间的路径质量,优化时间和成功率。MOE-APF的多功能性使其能够应对涉及非全面机器人,多个机器人,工业操纵器和动态障碍的路径规划挑战。

对成人进行人乳头瘤病毒疫苗
通过拥有书面急诊医疗方案以及设备和药物的书面急诊医疗方案,为管理与疫苗管理有关的医疗紧急情况做好准备。有关Immunize.org的“在社区环境中成年患者的疫苗反应的医疗管理”,请访问www.immunize.org/catg/catg.d/p3082.pdf。有关Immunize.org的“社区环境中儿童和青少年疫苗反应的医疗管理”,请访问www.immunize.org/catg/catg.d/p3082a.pdf。为了防止晕厥,在坐下或躺下时为患者接种疫苗,并考虑在接收疫苗后观察15分钟。