XiaoMi-AI文件搜索系统
World File Search System像素

范德华固体的机器人四维像素组装
通过组装层状二维材料 1、2,可以设计出具有原子级精确垂直组成的范德华 (vdW) 固体。然而,由微机械剥离的薄片 3、4 手工组装结构与可扩展和快速制造不兼容。进一步设计 vdW 固体需要精确设计和控制所有三个空间维度上的组成以及层间旋转。本文,我们报告了一种机器人四维像素组装方法,用于以前所未有的速度、精心设计、大面积和角度控制制造 vdW 固体。我们使用机器人组装由原子级薄的二维组件制成的预图案化“像素”。晶圆级二维材料薄膜的生长和图案化采用清洁、非接触式工艺,并使用由高真空机器人驱动的工程粘合剂印章进行组装。我们制备了多达 80 个独立层的范德华固体,由 100 × 100 μ m 2 的区域组成,这些区域具有预先设计的图案形状、横向/垂直编程的成分和可控的层间角度。这使得对范德华固体进行有效的光学光谱分析成为可能,揭示了 MoS 2 中新的激子和吸光度层依赖性。此外,我们制备了扭曲的 N 层组件,其中我们观察到了扭曲的四层 WS 2 在≥ 4° 的大层间扭曲角下的原子重构。我们的方法能够快速制造原子级分辨的量子材料,这有助于充分发挥范德华异质结构作为新物理 2、5、6 和先进电子技术 7、8 平台的潜力。对硅等无机晶体材料的结构和化学成分进行精确的三维 (3D) 空间控制(x、y、z)是集成电路的基础。通过堆叠二维材料 (2DM) 形成的范德华 (vdW) 固体不受晶格可公度性或层间键合的限制,因此与传统的顺序沉积晶体 1、2 相比具有两个优势。首先,相邻层之间的晶格和化学灵活性意味着可以生产具有层可调电学 4、5、9、磁性 9、10 和光电 11-14 特性的任意垂直晶体组合物序列。其次,这种层间灵活性引入了一个额外的维度 θ,即层间晶格旋转或扭曲,作为控制 vdW 固体性质的新自由度。这已在
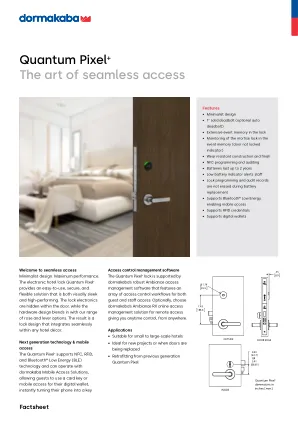
量子像素+无缝访问的艺术-Rokka.io
注意:此表中提供的信息仅用于一般参考。可用性,功能和规格可能因国家而异。有关更多信息,请联系您的当地代表。mifare,Mifare Ultralight,Mifare Plus和Mifare Desfire是NXP B.V.Bluetooth®单词标记和徽标是由蓝牙Sig,Inc。拥有的注册商标。在没有事先通知的情况下进行技术更改。版本12/2024。©2024 Dormakaba。
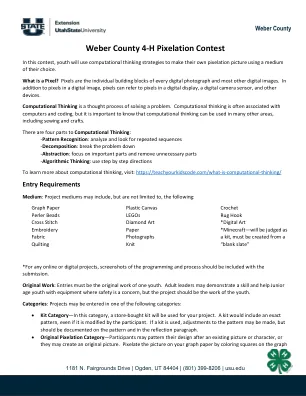
韦伯县4-H像素化比赛
1。参与者必须是当前注册的4-H成员,并且在进入之前在Zsuite中具有“活跃”状态。2。年龄段:年龄段由当前4-H年9月1日的参与者等级确定,如下所示:初中:3,4,5年级,必须至少8岁;中级:6、7或8年级;高年级,9、10、11或12年级。参与者的条目将使用随附的评论标题来判断,并有资格获得蓝色,红色或白色丝带。可以根据比赛和可用性授予奖品。3。年轻人必须作为个人进入,并且可能不会在团队中工作。4。4-H成员的原始工作:所有条目必须是参与4-H会员的原始作品,并在当前4-H年(9月至8月)中创建。参与者可以仅提交每个类别的条目进行判断。5。条目的格式:条目必须在.jpeg,.jpg,.png或pdf格式中。6。条目必须遵循条目要求列出的指南(请参见上文)。7。显示和将来的使用权:通过提交比赛的条目,4-H会员授予Weber County 4-H和USU扩展,并扩展了与在促销出版物和其他媒体中使用摄影相关性相关的使用和权利,而无需赔偿。某些条目可用于4-H计划和营销用途。8。发布:要求每个参与者都有足够的许可,同时授予艺术家和犹他州4-H,以根据需要出版和使用任何可识别的位置或拍摄的人。9。应由参与者保留文档,并应4-H青年发展计划的要求提供。条目应在像素化比赛中通过Zsuite提交。

mppc(多像素光子计数器)S13360系列
MPPC是一种称为SIPM(硅光层流)的设备。这是一种新型的光子计数设备,由多个Geiger模式APD(Avalanche Photodiode)像素组成。这是一种具有出色的光子计数能力和低工作电压的光轴导导器,并且不受磁场的影响。S13360系列是用于精确度量的MPPC。MPPC继承了先前产品的出色低浮肿特性,并进一步提供了较低的串扰和较低的深度计数。它们适合精确测量,例如流式细胞仪,DNA测序仪,激光显微镜和荧光测量,需要低噪声特征。

ATLAS Inner Tracker 像素探测器的开发(ITk ...
摘要:ATLAS 是 LHC 的两个主要实验之一,目的是研究物质的微观特性,以回答粒子物理学最基本的问题。在首次数据运行取得成功之后,LHC 通过三次加速器升级,突破了质心和亮度的能量极限,从而扩大了新发现和精确测量的可能性,最终形成了高亮度 LHC(HL-LHC)。 )。为了充分利用增加的亮度,计划对 ATLAS 内部探测器进行两次重大升级。第一次升级已于 2015 年初完成,插入了 IBL,即距离光束线仅 3.2 厘米的第四个像素层。第二次重大升级定于 2024 年进行,整个内部探测器将被完全由硅器件制成的全新内部跟踪装置取代,以应对 HL-LHC 的高粒子密度和强辐射环境,该装置在运行期间运行期间将提供 3000 fb −1,几乎是整个 LHC 计划内部光度平均值的十倍。本论文讨论的是
CT-PPS 跟踪系统的 3D 硅像素探测器
独特的中央生产过程的测量将使大型强子对撞机物理项目扩展到电弱领域和 QCD 领域成为可能,并且对物理的特殊敏感性超出了标准模型。为此,最近安装了 CMS-TOTEM 精密质子光谱仪,旨在在高亮度大型强子对撞机的正常操作条件下运行。光谱仪由位置和时间探测器组成,安装在距 CMS 两侧交互点约 210 m 的位置,位于称为“罗马罐”的移动结构内,可让您更接近光束。从相互作用中完好无损地出现的散射质子,仅损失了一小部分动量,被光束包络外部的大型强子对撞机磁铁偏转,并用硅像素探测器平面进行测量。相反,需要时间探测器来确定主顶点,利用两侧两个质子的到达时间信息,并在此基础上大大减少由于许多堆积事件而导致的背景。由于探测器将受到高辐射注量(估计约为 3 × 10 15 n eq / cm 2 ),因此 CT-PPS 跟踪器选择了所谓的 3D 硅像素传感器。来自三个主要制造商(CNM、FBK 和 SINTEF)的传感器在实验室和辐照前后的光束上进行了测量,以评估其特性和性能。最终探测器中使用了 CNM 传感器,以及为 CMS 像素跟踪器第一阶段升级而开发的读出芯片。两个六层空间站在 2016/2017 年大型强子对撞机冬季停运结束时进行了组装、测试和安装。探测器的调试正在进行中,通过使用从中心像素跟踪器开始开发的采集软件。检测器已经过校准,能够在 CMS 采集链内获取数据。第一次比对运行的数据已成功收集,分析正在进行中。

背景减法的有效的基于子蛋白像素的方法
摘要 - 如何在背景估计中实现竞争精度和更少的计算时间仍然是一项棘手的任务。在本文中,基于子苏皮纸模型提出了一种有效的视频序列背景减法方法。在我们的算法中,使用简单的线性迭代聚类方法构造了第一个帧的超级像素。将框架从颜色格式转换为灰色级别后,将初始超像素分为k较小的单元,即子串联像素,通过k均值聚类算法。然后,通过将每个亚固体像素表示为多维特征向量来初始化背景模型。对于随后的帧,子安排像素表示和加权度量检测到移动对象。为了处理幽灵伪像,根据每个集群中心表示的像素数量,设计了一个背景模型更新策略。由于每个超像素是通过子蛋白像素表示形式固定的,因此所提出的方法更有效,并实现了背景扣除的竞争性。实验结果证明了该方法的有效性。

1024 通道 268 nW/像素 36 × 36 μm
稿件收到日期:2023 年 8 月 31 日;修订日期:2023 年 11 月 14 日;接受日期:2023 年 12 月 9 日。本文经副主编 Mototsugu Hamada 批准。这项工作部分由斯坦福大学吴仔神经科学研究所资助;部分由斯坦福纳米制造设施和美国国立卫生研究院 (NIH) 资助,资助编号为 EY021271 和 EY032900。(通讯作者:Moonhyung Jang。)Moonhyung Jang、Pietro Caragiulo、Athanasios T. Ramkaj、AJ Phillips、Nicholas Vitale、Pulkit Tandon 和 Pumiao Yan 均就职于斯坦福大学电气工程系,斯坦福,加利福尼亚州 94305 美国(电子邮件:moon90@stanford.edu)。Maddy Hays 就职于斯坦福大学生物工程系,斯坦福,加利福尼亚州 94305 美国。 Wei-Han Yu 和 Pui-In Mak 就职于澳门大学微电子研究所,中国澳门。Changuk Lee 就职于加州大学伯克利分校电气工程与计算机科学系,美国加利福尼亚州伯克利市 94720。Pingyu Wang 就职于斯坦福大学材料科学与工程系,美国加利福尼亚州斯坦福市 94305。Youngcheol Chae 就职于延世大学电气与电子工程系,韩国首尔 03722。EJ Chichilnisky 就职于斯坦福大学神经外科和眼科学系汉森实验物理实验室,美国加利福尼亚州斯坦福市 94305。Boris Murmann 曾就职于斯坦福大学电气工程系,美国加利福尼亚州斯坦福市 94305。他现就职于夏威夷大学马诺阿分校电气与计算机工程系,美国夏威夷州檀香山 96822。 Dante G. Muratore 就职于代尔夫特理工大学微电子系,地址:2628 CD 代尔夫特,荷兰(电子邮件:dgmuratore@tudelft.nl)。本文中一个或多个图片的彩色版本可在 https://doi.org/10.1109/JSSC.2023.3344798 上找到。数字对象标识符 10.1109/JSSC.2023.3344798

展示从没有状态估计的像素飞行的敏捷飞行
摘要 - 次数是最敏捷的飞行机器人之一。尽管在基于学习的控制和计算机视觉方面取得了进步,但自动无人机仍然依赖于明确的状态估计。另一方面,人类飞行员仅依靠从板载摄像头的第一人称视频流将平台推向极限,并在看不见的环境中坚固地飞行。据我们所知,我们提出了第一个基于视觉的四摩托系统,该系统自动浏览高速的一系列门,而直接映射像素以控制命令。像专业的无人机赛车飞行员一样,我们的系统不使用明确的状态估计,并利用人类使用的相同控制命令(集体推力和身体速率)。我们以高达40 km/h的速度展示敏捷飞行,加速度高达2 g。这是通过强化学习(RL)的基于识别的政策来实现的。使用不对称的参与者批评,可以促进培训,并获得特权信息。为了克服基于图像的RL训练期间的计算复杂性,我们将门的内边缘用作传感器抽象。可以在训练过程中模拟这种简单但坚固的与任务相关的表示,而无需渲染图像。在部署过程中,使用基于Swin-Transformer的门检测器。我们的方法可实现具有标准,现成的硬件的自动敏捷飞行。尽管我们的演示侧重于无人机赛车,但我们认为我们的方法超出了无人机赛车的影响,可以作为对结构化环境中现实世界应用的未来研究的基础。

使用像素级伽马校正增强图像质量
复合材料是材料科学和工程中最重要的材料,包含两种或两种以上的材料。在材料工程中,扫描电子显微镜 (SEM) 技术是一种测量材料粒度的方法。一种替代 SEM 的新程序被称为人工智能 (AI)。人工智能 (AI) 是一门跨学科科学和计算机科学的分支,涉及解决需要人类智能和能力的问题。计算机视觉是人工智能的一个子领域,它使用一些算法通过使用计算机(称为图像处理)来检测图像的细节。检测粒子并测量 SEM 扫描的材料尺寸是一项重要任务,有助于描述其特征,传统上,尺寸是通过在 SEM 图像中添加网格或在任意粒子中绘制对角线来手动计算的。本文提出了一种基于人工智能 (AI) 的新模型,使用计算机视觉来分析所有粒子的尺寸。该模型用于检测复合材料(如石墨烯薄片)中添加剂的粒度,并根据扫描电子显微镜 (SEM) 上固定的参考尺寸测量它们的尺寸。该模型基于开源计算机视觉(OpenCV)库,利用多层 Canny 边缘检测、Sobel 滤波器、亮度和对比度算法,使用 Python 3。结果以非常低的处理时间 = 0.2 毫秒实现了非常满意的指示。