XiaoMi-AI文件搜索系统
World File Search System光标

眼控制鼠标光标
瑜伽近年来已成为世界各地许多人生活的常规部分。这对必要的瑜伽姿势进行了科学研究。瑜伽姿势估计是一种计算机视觉技术,可以预测人体的位置或姿势。姿势检测算法已被证明可用于姿势识别和提高瑜伽姿势的准确性。在当今的现代时代,ML和DL技术已被证明对于对象发现任务很重要。我们可以有效地使用该模型来识别不同重要的身体部位并实时估算用户姿势。为实现这一目标,我们用不同的瑜伽姿势图像训练模型。当图像被送入姿势估计模型时,它通过执行特征提取来分析图像并识别身体部位,表明其在屏幕上的位置。此外,该模型为每个检测提供了一个置信值,表明给定图像正确识别为输入的可能性。我们使用了不同的瑜伽姿势,例如骆驼姿势,下dog姿势,女神姿势,木板姿势,树姿势,Warrior2姿势来训练该模型,这使其在识别各种姿势方面非常准确。这项研究的主要目标是使用此检测技术来帮助人们确定他们正在执行的瑜伽姿势。此外,我们还解决了当前系统的缺点,例如它们的准确性差,高处理成本以及对各种身体形状和瑜伽样式的适用性限制。在本文中,我们提出了一种基于卷积神经网络(CNN)的方法来创建瑜伽立场检测系统。建议的技术旨在通过提供更精确,有效和广泛适用的解决方案来识别瑜伽姿势和产生反馈的方法,以改善当前系统的缺点。总体而言,基于技术的工具在我们的研究中的应用可能有助于设计更多定制和成功的瑜伽实践。我们的发现可以帮助构建虚拟助手和智能瑜伽垫等应用程序,从而改善瑜伽实践的可访问性和个性化。
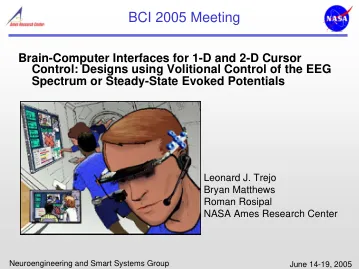
1-D和2-D光标控制的脑计算机接口
•移动或受限环境的新接口•在正常环境中增强交互•带宽 /多任务处理•加快界面•增强的情境意识•提高任务安全和可靠性,通过早期发现不良状态和自适应自动化< / div> < / div>

光标BCIS的长期无监督重新校准
皮质内脑机构界面(IBCIS)需要频繁地重新校准,以维持由于随着时间的推移积累而导致的神经活动变化而保持稳健的性能。补偿这种非机构性将使您无需进行监督的重新校准期,在这种情况下,用户无法自由使用其设备。在这里,我们介绍了一个隐藏的马尔可夫模型(HMM),以推断用户在IBCI使用期间朝着哪些目标转向。然后,我们使用这些推断的靶标对系统进行重新训练,从而使无监督的神经活动适应。我们的方法在两个月内以大规模的闭环模拟和人类IBCI用户的闭环模拟以优于最高的最新技术。利用跨越五年IBCI记录的离线数据集,我们进一步显示了最近提出的重新校准的数据分配匹配方法如何在长时间尺度上失败;只有目标推断方法似乎能够实现长期无监督的重新校准。我们的结果表明,如何使用任务结构将嘈杂的解码器引导成一个高度表现的解码器,从而克服了临床翻译BCI的主要障碍之一。

使用基于 EEG 的方法进行计算机光标控制。
摘要 — 在当代,计算机和硅技术已成为 21 世纪不可或缺的一部分,并且发展迅速,可用于发展的每个领域。本文介绍了使用由神经元电活动产生的脑电图控制计算机/笔记本电脑软件架构的技术现象。脑电图仪非常复杂,难以读取和识别,本文通过对信号进行 FFT 变换来使用。EEG 与计算机实时交互,以控制光标执行左键单击、双击和右键单击的效果。该技术可用于为瘫痪或手臂截肢者提供辅助平台,以操作笔记本电脑以及控制各种应用程序。
在眼睛注视跟踪中的调查以控制光标运动
计算机科学与工程系教职员工1学生,计算机科学与工程系2,3,4,5 Vidya Vikas工程技术研究所,印度卡纳塔克邦迈索鲁,摘要:在由一个物理挑战的人控制鼠标时,实际上是一个艰难的人。要为无法物理使用鼠标使用的人找到解决方案,我们建议使用眼动动作该鼠标光标控制。眼目光是使用眼动以控制鼠标的访问计算机的另一种方法。对于那些细触摸屏的人来说,鼠标无法访问,眼睛凝视是一种替代方法,可以使用眼睛的运动来操作用户计算机。眼运动可以被视为人力计算机通信的关键实时输入介质,这对于身体残疾的人尤为重要。为了提高用户计算机对话中眼睛跟踪技术的可靠性,移动性和可用性,使用网络摄像头提出了一种新颖的眼部控制系统,而无需使用任何额外的硬件。所提出的系统专注于仅使用用户的眼睛提供简单便捷的交互式模式。所提出的系统的使用流旨在完美遵循人类的自然习惯。提议的系统描述了虹膜的实现和光标的实现,该系统可根据IRIS位置进行,可用于使用网络摄像头在屏幕上控制光标,并使用Python关键字实施:脆弱性,Web应用程序,虚拟鼠标,人类计算机交互

使用计算机视觉Aarti Morajkar 1,Atheena Mariyam James 1,Minoli Bagwe 1,
在本文中介绍了人类计算机接口(HCI),以允许用户用手势和语音命令控制鼠标光标。系统使用没有代码ML的计算机视觉效果净B4体系结构来识别不同的手势并将其映射到相应的光标运动。目的是创建一种与系统交互的更有效,更直观的方式。主要目的是为现有鼠标控制系统提供可靠且具有成本效益的替代方法,从而使用户可以通过手势和语音命令控制鼠标光标。该系统设计为简单的设置过程,既直观又对用户友好。高度可配置的系统允许用户自定义其工作原理以最适合其需求。通过多个实验评估了系统的性能,这表明基于手势的小鼠控制系统可以准确100%,并可靠地移动鼠标光标。总体而言,该系统可能会改善生活质量,并提高身体残障人士的独立性。

脑局部场电位在 11 个月内的稳定性......
摘要。局部场电位 (LFP) 源自数千个神经元。因此,它们可以为脑机接口 (BMI) 提供持久而稳定的控制信号。在这里,我们评估了在使用基于 LFP 的 BMI 进行 2-D 光标控制期间 2 只猴子初级运动皮层中 LFP 的稳定性。使用无需再训练或适应的仿生 BMI 解码器,猴子表现出高性能,并且保持稳定超过 11 个月。离线时,我们通过从每个会话中的各个特征计算大脑控制的光标速度的解码器并在最后一个会话中使用它们解码速度来检查 LFP 特征的稳定性。许多 LFP 特征与光标速度显示出高度相关性,并且光标速度在 11 个月内变得越来越稳定。这表明猴子学会了运动皮层场电位和输出之间的稳定映射,并且 LFP 将为 BMI 提供高度稳定的信号源。

M-Commerce中的纤维ac式反馈:刺激感知的控制和感知的所有权,以提高预期满意度
替代人的触摸人物增加了社交媒体喜欢的(研究1)和对产品的心理所有权,因为感觉到了触摸对象的手的身体所有权(研究2-4)。非诊断手移动减弱了这种效果(研究5)。在VR商店购物时,与使用光标相比,手(触摸现在与缺席)的存在对人体所有权的看法增加了。替代触摸(与缺席)增加了产品评估和付款意愿,但与光标条件相对而不是。在跨条件下,产品的心理所有权没有差异。有一个

假肢的感人瞬间:能“感觉”的新型仿生肢体
过去也曾出现过类似的 BCI。然而,这些 BCI 有局限性。用户可以按下按钮——这是一个不需要连续移动的简单动作。事实证明,使用这些 BCI 很难实现更复杂的动作。在何和他的团队的演示中,受试者通过精神控制机械臂跟踪光标。假手指能够像真手指一样连续跟踪光标。他说,该系统可以与用脑电图记录和无线电极编程的智能手机应用程序一起使用。这将消除对脑部手术的需要。