XiaoMi-AI文件搜索系统
World File Search System光流


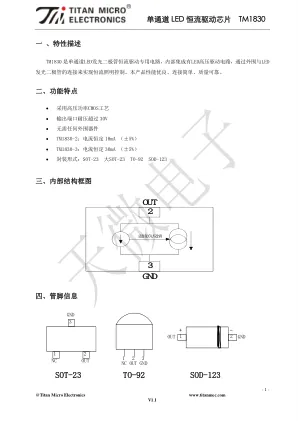
单通道LED 恒流驱动芯片TM1830
如图1 所示,要使TM1830 工作在恒流状态下,芯片OUT 引脚上电压应大于2.2V,即芯片的2、3 脚之间的电压应达到2.2V 以上。在应用时,电源串接LED 灯后加在OUT 引脚上的电压建议在3.0V 左右。 如果芯片持续工作在额定恒流状态下,TM1830-2 和TM1830-3 的OUT 引脚电压应分别在12.0V 和8.0V 以内为宜。

sofnet:基于光流的大型...
来自多个中心的大脑磁共振成像(MRI)数据通常在成像条件下表现出差异,例如所使用的核磁共振仪器的类型和随机噪声的存在。此外,MRI切片之间差距的差异进一步使数据的可用性复杂化了高级人工智能(AI)分析。基于深度学习的方法已成为解决挑战的实用解决方案。然而,现有的研究在很大程度上忽略了大脑MRI数据的增强,尤其是在面对明显的切片间隙时,例如在我们的临床大脑MRI切片中观察到的大约6 mM。响应这一研究差距,我们旨在开发新的方法来增强大脑MRI数据,重点关注更大的切片差距。为了实现这一目标,我们提出了SOFNET,它利用了基于光流和编码器 - 二次骨架的sofnet。我们模型的主要目标是插值MRI切片,同时保持特征一致性。利用光流法,与其他超分辨率算法相比,该方法表现出了出色的性能,我们提出的方法已在三个不同的大脑MRI数据集上进行了评估,并明确解决了4.2 mm和6.0 mm之间的差距。实验结果强调了SOFNET在生成适应的脑MRI数据方面获得的超分辨率质量的显着增强,超过了其他单位超级分辨率(SISR)方法。为了确保插值脑MRI切片的可信度,我们基于诸如峰值信噪比(PSNR)和结构相似性指数(SSIM)等指标(例如峰值信噪比(PSNR))对三个MRI进行了实验。这些实验证明了我们方法在将低分辨率MRI数据转换为清晰可靠的大脑MRIS中的有效性,从而可以使用AI技术进行了改进的分析。

40W以下荧光灯 4件
2024年7月3日 — (4) 部长官房卫生监察长、国防政策局局长、国防采办、技术和后勤局局长(以下简称“国防部”暂停提名)…… *取消标准要求,可接受同等或更高级的产品(包括其他公司的产品)。 *以同等产品进行投标……
基于深度学习的光流有多好?
本文探讨了基于深度学习的模型与Orb-Slam3框架的深入估算的整合,以应对单眼同时位置和映射(SLAM)的挑战,并与纯旋转运动有关。这项研究正在研究使用激发通用网络进行这些网络的深度估计和混合组合的可能性,以取代传统的深度传感器并改善SLAM系统中的规模。使用定制的相机阵容进行了一系列实验,旨在隔离纯旋转运动。分析包括评估每个模型对SLAM过程的影响以及对深度估计和结果的定量性能指标(CPI)。结果显示了深度估计值的准确性和SLAM性能之间的联系,这强调了模型在改进SLAM系统中的深度估计潜力。这些发现有助于理解单眼深度估计在与污泥集成中的作用,尤其是在需要精确空间意识的应用中。

使用多个光流算法
摘要:光流技术具有运动跟踪的优势,并且长期以来一直在降水中使用,用于使用接地雷达数据集跟踪降水场运动。但是,基于光流的模型的性能和预测时间尺度受到限制。在这里,我们介绍了将深度学习方法应用于光流量估计的结果,以扩展其预测时间尺度并增强现象的性能。表明,深度学习模型可以更好地捕获降水事件的多空间和多阶段运动,该模型与传统的光流估计方法相对。该模型包括两个组成部分:1)基于多个光流算法的回归过程,该过程更准确地捕获了与单个操作流量算法相比的多空间特征; 2)一个基于U-NET的网络,该网络训练降水运动的多个临时特征。我们通过韩国的降水案例评估了模型性能。尤其是,回归过程通过将多个光流算法与梯度下降方法相结合,从而最大程度地降低了错误,并且仅使用单个光流算法的其他模型胜过其他模型,直到3小时提前时间。此外,U-NET在捕获非线性运动中起着至关重要的作用,而非线性运动无法通过传统的光流估计来捕获简单的对流模型。因此,我们建议使用深度学习的拟议的光流估计方法在改善基于传统的光学流量方法的当前操作现象模型的性能中起着重要作用。
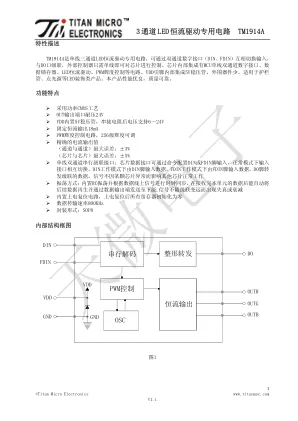
3通道LED恒流驱动专用电路TM1914A
功能说明 1、模式设置 本芯片为单线双通道通讯,采用归一码的方式发送信号。芯片接收显示数据前需要配置正确的工作 模式,选择接收显示数据的方式。模式设置命令共48bit,其中前24bit为命令码,后24bit为检验反码, 芯片复位开始接收数据,模式设置命令共有如下3种: (1)0xFFFFFF_000000命令: 芯片配置为正常工作模式。在此模式下,首次默认DIN接收显示数据,芯片检测到该端口有信号输 入则一直保持该端口接收,如果超过300ms未接收到数据,则切换到FDIN接收显示数据,芯片检测到该 端口有信号输入则一直保持该端口接收,如果超过300ms未接收到数据,则再次切换到DIN接收显示数据。 DIN和FDIN依此循环切换,接收显示数据。 (2)0xFFFFFA_000005命令: 芯片配置为DIN工作模式。在此模式下,芯片只接收DIN端输入的显示数据,FDIN端数据无效。 (3)0xFFFFF5_00000A命令: 芯片配置为FDIN工作模式。在此模式下,芯片只接收FDIN端输入的显示数据,DIN端数据无效。 2、显示数据

荧光灯外11起案例-公示
如果金额包含小于 1 日元的小数部分,则小数部分将四舍五入。 ) 为中标价格,因此,无论投标者是消费税等应税企业还是免税企业,均须在投标文件中记载相当于合同估算金额的 110/100 的金额。 7.投标保证金和合同保证金豁免 8.无效投标 第5条规定不具备投标资格的人员或违反投标条件的投标将被视为无效。 9.是否需要签订合同?是的 10.适用的合同条款:一般合同条款、有关勾结等非法活动的特殊条款、有关排除有组织犯罪集团的特殊条款11.其他 (1)接收投标邀请书及说明书等时,须提交《资格审查结果通知书》(各部委统一资格审查结果)复印件。 (2)如您希望参加同等产品的投标,请通过另行发放的投标指南中所列的联系方式,于2022年6月前提交详细信息。