XiaoMi-AI文件搜索系统
World File Search System全轨
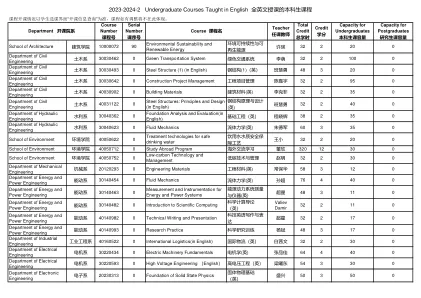
2023-2024-2英语教授的本科课程...
Department of Physics 物理系 20430225 2 Fundamentals of Physics (1) 基础物理学 (1) 蒋硕 96 5 150 0 Department of Physics 物理系 20430234 1 Fundamentals of Physics (2) 基础物理学 (2) 蒋硕 64 4 102 0 Department of Physics 物理系 20430265 3 Fundamentals of Physics (3) 基础物理学 (3) Kim Kihwan 80 5 130 0 School of Life Sciences 生命学院 30450203 1 Biochemistry(1)(in English) 生物化学 (1)( 英文 ) 刘栋 48 3 175 0 School of Life Sciences 生命学院 30450203 2 Biochemistry(1)(in English) 生物化学 (1)( 英文 ) 刘栋 48 3 180 0 School of Life Sciences 生命学院 30450263 0 Microbiology(in English) 微生物学 ( 英文 ) 陈国强 48 3 80 0 School of Life Sciences 生命学院 30450303 1 Genetics(in English) 遗传学(英文) 王田 48 3 90 0 School of Life Sciences 生命学院 30450303 2 Genetics(in English) 遗传学(英文) 王田 48 3 100 0 School of Life Sciences 生命学院 30450453 0 Molecular Biology(in English) 分子生物学 ( 英 ) 杨扬 48 3 150 0

基于新能源发电改进型移相全桥变换器研究
中图分类号 : TM561 Analysis of Improved Phase-shift Full-bridge Converter for New Energy Generation ZENG Zhihui 1, 2 LIU Yunpeng 1, 2 ZHANG Linmei 1, 2 YANG Ming 1, 2
非洲绿猴(African Green Monkey)全基因组CRISPR sgRNA ...
目的基因 sgRNA 数目: 64853 ;阴性对照 sgRNA 数目: 2000 ; sgRNA 大小: 20bp
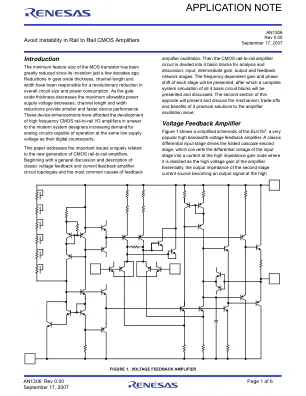
AN1306:避免轨对轨 CMOS 放大器不稳定
电感器是一种具有频率相关阻抗特性的电气元件;电感器在低频时表现出低阻抗,在高频时表现出高阻抗。虽然“理想”运算放大器输出阻抗特性为零,但“实际”放大器的输出阻抗是电感性的,并且像电感器一样随着频率的增加而增加。EL5157 的输出阻抗如图 2 所示。使用运算放大器的应用中的一个常见挑战是驱动电容负载。之所以有挑战性,是因为运算放大器的电感输出与电容负载一起形成 LC 谐振槽拓扑,其中电容负载电抗与电感驱动阻抗一起导致当反馈围绕环路闭合时产生额外的相位滞后。降低相位裕度会导致放大器振荡的可能性。振荡时,放大器会变得非常热,并且可能会自毁。针对这一挑战,有几个非常著名的解决方案。1) 最简单的解决方案是在输出端串联一个电阻,以强制反馈来自放大器的直接输出,同时隔离无功负载。这种方法的代价是牺牲负载上少量的输出电压摆幅。2) 另一个直接的解决方案是应用“缓冲网络”。缓冲网络是一个与电容负载并联的电阻和电容,在负载上提供电阻阻抗以减少输出相移;提供额外的稳定性。

3 位轨到轨闪存 ADC 的设计
我要感谢我的同事 Edivânia Ferreira Silva 和我的同事 Mateus Cortez 帮助我进行解码。感谢芯普微电子给我参加专业布局课程的机会(对我这项工作帮助很大)。特别感谢我的姐姐、母亲、叔叔、阿姨、表兄弟和朋友,他们在整个旅程中一直激励着我。

在轨服务
40 Ana Saplan,“会合和服务行动执行联盟 (CONFERS)”,国防高级研究计划局,2021 年 6 月访问,https://www.darpa.mil/program/consortium-for-execution-of-rendezvous-and-servicing-operations#:~:text=CONFERS%20envisions%20a%20permanent%2C%20self,Government%20about%20on%2Dorbit%20servicin g.&text=The%20Agency%20also%20intends%20by,commercial%20on%2Dorbit%20servicing%20organizations。
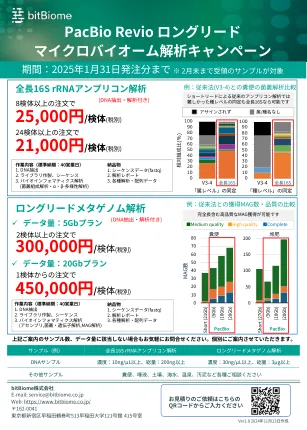
全长 16S rRNA 扩增子分析
bitBiome Inc. 电子邮件:service@bitbiome.co.jp 网站:https://www.bitbiome.co.jp/ 日本东京新宿区早稻田鹤卷町 513 号 162-0041 早稻田大学第 121 栋 415 室
基于全 SiC 隔离 DC-DC 转换器的直流电气化铁路固定(轨道旁)储能系统
摘要:目前,在欧洲的几条铁路网络中,使用传统的直流电气化系统,既无法增加交通量,也无法使机车以标称功率运行。轨道旁储能系统 (TESS) 可以作为新建变电站的替代解决方案。TESS 限制接触线电压下降并平滑高峰交通期间吸收的功率。因此,可以在限制成本和环境影响的同时提高电力系统的效率。本文提出了一种基于全 SiC 隔离 DC/DC 转换器的 TESS 新拓扑,该转换器与锂离子电池和电流隔离相结合,为运行安全提供了重大优势。发生故障时,转换器的输入和输出端子将电气分离,并且接触线电压绝不会直接施加到电池上。此外,使用 SiC MOSFET 可以获得具有高开关频率的出色效率。本文第一部分介绍了基本 TESS 模块的主要特性,第二部分针对 1.5 kV 直流线路的典型情况提出了一种尺寸确定方法,该方法表明了使用 TESS 增强电源的局限性。最后,介绍了基本模块原型的实验结果。

NSOPA905x 40-V 轨到轨输入/输出,6MHz,低...
8.1.概述 ...................................................................................................................................................................... 16 8.2.功能框图 ...................................................................................................................................................... 16 8.3.特性描述 ...................................................................................................................................................... 16 8.3.1.脉冲友好 ............................................................................................................................................................. 16 8.3.2.斜率提升 .................................................................................................................................................... 17 8.3.3.共模输入级 ................................................................................................................................................ 17 8.3.4.EMI 抑制 ........................................................................................................................................................................... 18 8.3.5.驱动电容负载 ........................................................................................................................................................... 18 8.3.6.热保护 ........................................................................................................................................................... 19 8.3.7.电气过载 ........................................................................................................................................................... 19