XiaoMi-AI文件搜索系统
World File Search System共形

使用人工智能检查星系的形状
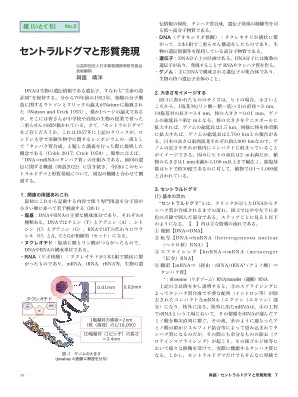
图 02 卷积神经网络对猫、狗、马的图像进行分类的图像。假设我们输入一张猫的图像,并执行卷积等计算以获得三个输出,y 1 =1、y 2 =1、y 3 =1,我们试图从中确定它是否是一只猫。那时,我们不再平等对待这三种输出,而是给予重要的信息更高的分数。例如,y 1 显然是猫眼,所以我们会给它 5 倍的分数,而 y 2 和 y 3 看起来像猫的鼻子和耳朵,但它们看起来也像狗的鼻子和耳朵,所以我们'会给他们1倍的积分。因此最终传递给猫分类器的总点数为 z 1 = 5 + 1 + 1 = 7。另一方面,在狗分类器中,y 1 不是狗的眼睛,因此这些点乘以 0,y 2 和 y 3 乘以 1,因此 z 2 =0+1+1=2。在对于马分类器来说,y 1 、y 2 和 y 3 不是马的眼睛、鼻子和耳朵,所以都得 0 分,并且 z 3 =0+0+0=0。结果,猫分类器获得最高分数,最终输出“这张图片是一只猫”。为了能够自动做出高精度的判断,网络会利用大量猫的图像等教学数据进行训练,相当于调整点数增加的乘数(权重)。

超正态空间中的量子共形对称性
在没有完整的量子引力理论的情况下,量子场和量子粒子在时空叠加中的行为问题似乎超出了理论和实验研究的范围。在这里,我们使用量子参考系形式主义的扩展来解决位于共形等价度量叠加上的克莱因-戈登场的这个问题。基于“量子共形变换”的群结构,我们构造了一个显式量子算子,它可以将描述时空叠加上的量子场的状态映射到表示闵可夫斯基背景上质量叠加的量子场的状态。这构成了一个扩展的对称性原理,即量子共形变换下的不变性。后者允许通过将微分同胚非等价时空的叠加与弯曲时空上更直观的量子场叠加联系起来,建立对微分同胚非等价时空的叠加的理解。此外,它可以用于将弯曲时空中的粒子产生现象导入到其共形等价对应部分,从而揭示具有修正克莱因-戈登质量的闵可夫斯基时空的新特征。

国防部互助协会国防学院分会
备注 1 户口簿摘录(企业为法人的,需提供登记簿核证副本) 1 份 2 企业历史 1 份 3 国防部互助会 国防学院分会 清洁管理委托合同(草稿) 1 份 4协议书(草案) 1份 5 都道府县知事等颁发的营业执照复印件 1份(仅限于需要营业执照等的企业) 6财务报表 1 份 7 纳税证明(个人为《国税通则施行条例》附件第 9 号格式 3-2,法人为

表观遗传时钟的不确定性定量通过共形分位数回归
表观遗传年龄预测因子是Horvath的表观遗传钟1,这是一个统计预测模型,在353 CpG位点使用DNAM至1个预测年龄。2种训练表观遗传时钟的标准方法涉及几个关键步骤:(i)从具有不同背景的个体3个个体的生物样本中收集生物样本; (ii)提取DNA并进行DNA甲基化分析; (iii)进行数据预处理4个程序,例如缺少数据插补,离群值删除和数据归一化; (iv)采用特征筛选方法5来识别相关的CPG站点,这些位点可预测年龄或与衰老过程相关; (v)将高维6回归模型与弹性净罚款拟合; (vi)在独立的测试数据集上评估模型性能,以验证其7个准确性和鲁棒性。8尽管有完善的构造表观遗传时钟的管道,但其中大多数仅提供点平均预测1,2,5。9

原子层沉积过程中非理想共形性的建模...
a 奥地利维也纳技术大学微电子研究所 Christian Doppler 高性能 TCAD 实验室,Gußhausstraße 27-29, 1040,维也纳,奥地利 b 奥地利维也纳技术大学微电子研究所,Gußhausstraße 27-29, 1040,维也纳,奥地利 c Silvaco Europe Ltd.,Compass Point, St Ives, Cambridge, PE27 5JL,英国

共形效率作为适合联合学习的比较模型评估的度量
a Janssen Pharmaceutica NV, Turnhoutseweg 30, Beerse 2340, Belgium b KU Leuven, ESAT-STADIUS, Kasteelpark Arenberg 10, Heverlee 3001, Belgium c Machine Learning Research, Research & Development, Pharmaceuticals, Bayer AG, Berlin 10117, Federal Republic of Germany d Novartis Institutes for BioMedical Research, Novartis Campus, Boehringer Ingelheim Pharma GmbH&Co。KG,Birkendorfer Str。65,Biberach A der Riss 88397,德国联邦共和国F分子AI,发现科学,R&D,R&D,Astazeneca,Astrazeneca,Astrazeneca,剑桥,英国G Amgen Research(Munich)GmbH,Sta i {Sta i {eSSAESTRAßE2开发,默克KGAA,Frankfurter Strasse 250,Darmstadt 64293,联邦德国联邦J模式信息小组,数字研究解决方案,高级信息学和分析,Astellas Pharma Inc.,21,Miyukigaoka,Miyukigaoka,Tsukuba-Shi,Ibaraki,Ibaraki,Ibaraki,Ibaraki 305-85-85-85-85-8555,日本,65,Biberach A der Riss 88397,德国联邦共和国F分子AI,发现科学,R&D,R&D,Astazeneca,Astrazeneca,Astrazeneca,剑桥,英国G Amgen Research(Munich)GmbH,Sta i {Sta i {eSSAESTRAßE2开发,默克KGAA,Frankfurter Strasse 250,Darmstadt 64293,联邦德国联邦J模式信息小组,数字研究解决方案,高级信息学和分析,Astellas Pharma Inc.,21,Miyukigaoka,Miyukigaoka,Tsukuba-Shi,Ibaraki,Ibaraki,Ibaraki,Ibaraki 305-85-85-85-85-8555,日本,

临界混合电路中的共形不变性和量子非局域性
通过揭示不同电路深度各个子区域的纠缠熵和互信息的时空共形协方差,我们建立了 (1 + 1) 维混合量子电路中共形场论 (CFT) 在测量驱动纠缠转变时的出现。虽然演化是实时发生的,但电路的时空流形似乎承载着具有虚时间的欧几里得场论。在整篇论文中,我们通过在空间和/或时间边界注入物理量子位来研究具有几种不同边界条件的 Clifford 电路,所有这些都给出了底层“Clifford CFT”的一致特征。我们强调 (超) 通用结果,这些结果仅仅是共形不变性的结果,并不关键地依赖于 CFT 的精确性质。其中包括由于测量引起的量子非局域性而导致的无限纠缠速度和混合初始状态的临界净化动力学。

通过准共形几何和卷积神经网络自动检测和注册大脑皮层表面标志
在医学成像中,表面配准被广泛用于对解剖结构进行系统比较,一个典型的例子是高度复杂的大脑皮层表面。为了获得有意义的配准,一种常见的方法是识别表面上的突出特征,并在它们之间建立低失真映射,将特征对应关系编码为界标约束。之前的配准工作主要集中在使用手动标记的界标和解决高度非线性的优化问题,这非常耗时,因此阻碍了实际应用。在这项工作中,我们提出了一种使用准共形几何和卷积神经网络自动检测和配准大脑皮层表面界标的新框架。我们首先开发了一个界标检测网络 (LD-Net),该网络允许根据表面几何形状在给定两个规定的起点和终点的情况下自动提取界标曲线。然后,我们利用检测到的界标和准共形理论实现表面配准。具体来说,我们开发了一个系数预测网络 (CP-Net),用于预测与所需基于地标的配准相关的 Beltrami 系数,以及一个名为磁盘 Beltrami 求解器网络 (DBS-Net) 的映射网络,用于从预测的 Beltrami 系数生成准共形映射,其中双射性由准共形理论保证。实验结果证明了我们提出的框架的有效性。总之,我们的工作为基于表面的形态测量和医学形状分析开辟了新途径。

使用共形预测对基于模型的控制器的不确定性定量和鲁棒化
在基于现代模型的控制框架中,例如模型预测控制或基于模型的信息学习学习,机器学习已成为一种无处不在的技术类别,以提高动态模型的准确性。通过利用诸如神经网络之类的表现力体系结构,这些框架旨在通过构建系统动力学的准确数据驱动表示,旨在提高系统的模型精度和控制性能。尽管对其非学习顾问进行了显着的绩效提高,但对于这些基于模型的模型的基于模型的控制器在不确定性的存在下,这些模型的控制器通常几乎没有保证。尤其是在模拟误差,噪声和外源性干扰的影响下,确定这些学习模型的准确性是一项挑战。在某些情况下,甚至可能违反约束,使控制器不安全。在这项工作中,我们提出了一个新颖的框架,该框架可以应用于大量的基于模型的控制器,并通过以在线和模块化方式鲁棒化基于模型的控制器,从而减轻上述问题,并在模型的准确性和约束满意度上提供可证明的保证。该框架首先部署保形预测,以生成有限的,可证明的有效的不确定性区域,以无分配方式为动态模型。通过动态约束程序,这些不确定性区域被纳入约束中。关键字:基于学习的控制,基于模型的控制,不确定性量化1。(2023a))。Jiahao等。Jiahao等。与预测参考生成器的配方一起,生成了一组可鲁棒的参考传播,并将其纳入基于模型的控制器中。使用两个实际的案例研究,我们证明我们提出的方法不仅产生了良好的不良区域,这些区域建立了模型的准确性,而且还使闭环系统以强大但不保守的方式满足约束。简介由于非线性优化框架的最新进展以及计算资源的可用性增加,在广泛的域上应用基于模型的控制器的应用趋势是趋势。,用于建筑物中的温度控制(Yao和Shekhar(2021)),用于自动驾驶汽车(Wu等人(2022))和四型控制(Chee等人机器学习方法的扩散同时导致了学习增强的,基于模型的控制框架的发展,这些框架利用学习工具通过改进动态模型来提高控制性能,例如(2023)。尽管这些发展激增,但这些基于学习的控制框架在不确定性存在下如何执行的问题仍然是一个积极的研究主题(Mesbah等人。(2022); Brunke等。(2022))。在这项工作中,我们通过提出一个新颖的框架来解决这个问题,该框架系统地允许基于模型的控制器在模型不匹配,噪声和外部干扰的集体影响下稳健地满足约束。