XiaoMi-AI文件搜索系统
World File Search System具象化

虚拟身体部位的即时分离——罗兰·菲斯特
摘要 多感官身体错觉的证据表明,身体表征可能是可塑的,例如,通过体现外部物体。然而,根据当前任务需求调整身体表征也意味着,如果不再需要外部物体,它们就会脱离身体表征。在当前的网络研究中,我们引入了二维 (2D) 虚拟手的具象化,可以通过计算机鼠标或触摸板的主动移动来控制。在初始具象化之后,我们通过比较两种情况来探索脱离身体的情况:参与者要么继续移动虚拟手,要么停止移动并保持手静止。基于将身体表征概念化为一组多感官绑定的理论解释,如果身体表征不再通过相关的视觉运动信号更新,我们预计虚拟手会逐渐脱离身体。与我们的预测相反,一旦参与者停止移动虚拟手,它就会立即脱离身体。这个结果在两个后续实验中得到了复制。观察到的瞬间脱离肉身可能表明人类对虚拟环境中动作和身体的快速变化很敏感,因此会特别迅速地调整相应的身体表现。

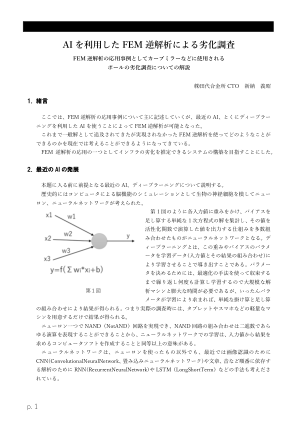
量子回路设计における最适化问题
(1)(Kokuken)日本科学技术局研究与发展战略中心,“战略建议:每个人的量子计算机”,2018年。 https:// wwwjst.go.jp/crds/pdf/2018/sp/crds-fy2018-sp-04.pdf(2)p.w.Shor,“用于量子计算的算法:离散日志和保理”,Proc第35届IEEE计算机科学序言研讨会,第124-134页,1994年。(3)L.K.Grover,“用于数据库搜索的快速量子机械算法”,第28 ACM计算理论座谈会论文集,第212-219页,1996年。(4)N。Kunihiro,“代理量计算机的计算时间的精确分析”,IEice Trans基础,第88-A卷,第105–111页,2005年。(5)M.A。nielsen和I.L.chuang,量子计算和量子信息,剑桥大学出版社,2000年。(6)A。Peruzzo,J。McClean,P。Shadbolt,M.-H周,P.J。Love,A。Aspuru-Guzik和J.L.O'Brien,“光子量子处理器上的变异特征值求解器”,《自然通信》,第5卷,第1期,2014年7月,第4213页(7)to奥利T.可逆计算,在:de bakker J.,van leeuwen J.(eds)自动机,语言和程序 - iCalp 1980,计算机Sci-Ence中的讲义,第85卷,Springer,柏林(8)Arxiv e-Prints,Quant-PH/9902 062,1999年2月。(9)K。Iwama,S。Yamashita和Y. Kambayashi,“设计基于CNOT的量子CUITS的跨形成规则”,设计自动化会议,第419-429-2002页,2002年。(10)Z. Sasanian和D.M.(12)M。Soeken,M。Roetteler,N。Wiebe和G.D. Micheli,“基于LUT的层次可逆逻辑Synthe-Sis”,IEEE TransMiller,“可逆和Quan-Tum电路优化:一种功能性方法”,《可使用的计算》第4个国际研讨会(RC 2012),第112-124页,2013年。((11)A。Mishchenko和M. Perkowski,“快速的启发式启发式最小化 - 独家及产品或产品”,第五届国际式Reed-Muller Workshop,pp.242–250,2001。计算。集成。电路系统,第38卷,第9期,第1675–1688页,2019年。((13)E。Souma和S. Yamashita,“同时分解许多MPMCT大门时,减少T计数”,第50届国际多重逻辑国际研讨会(IS- MVL 2020),第22-22-27页,11月2020年,((14)X. Zhou,D.W。 Leung和I.L.Chuang,“量子逻辑门结构的方法论”,物理。 修订版 A,第62卷,052316,2000年10月。 ((15)A。Barenco,C.H。 Bennett,R。Cleve,D.P。 Divincenzo,Chuang,“量子逻辑门结构的方法论”,物理。修订版A,第62卷,052316,2000年10月。((15)A。Barenco,C.H。Bennett,R。Cleve,D.P。 Divincenzo,Bennett,R。Cleve,D.P。Divincenzo,


具身人工智能调查:从模拟器到研究任务
摘要 — 从“互联网人工智能”时代到“具身人工智能”时代,出现了一种新兴的范式转变,人工智能算法和代理不再从主要来自互联网的图像、视频或文本数据集中学习。相反,他们通过与环境的互动从类似于人类的自我中心感知中进行学习。因此,对具身人工智能模拟器的需求大幅增长,以支持各种具身人工智能研究任务。对具身人工智能日益增长的兴趣有利于对通用人工智能 (AGI) 的更大追求,但目前还没有对这一领域的当代和全面的调查。本文旨在为具身人工智能领域提供百科全书式的调查,从其模拟器到其研究。通过评估我们提出的七个特征的九个当前具象人工智能模拟器,本文旨在了解模拟器在具象人工智能研究中的用途及其局限性。最后,本文调查了具象人工智能的三个主要研究任务——视觉探索、视觉导航和具象问答 (QA),涵盖了最先进的方法、评估指标和数据集。最后,通过调查该领域发现的新见解,本文将为任务模拟器的选择提供建议,并为该领域的未来方向提供建议。


军事武器人工智慧(AI)化对战争伦理影响之研究
2019年,https://brokingdefense.com/2019/10/ethical-ai-for-war-defense-innovation-board-says-it-can-be-done/,

ITS Connect 助力基于人工智能的路边基础设施
住友电气工业株式会社 电装株式会社 丰田汽车株式会社 丰田通商株式会社 松下电器产业株式会社 日立制作所 三菱电机株式会社 瑞萨电子株式会社 地址:东京都港区港南 2-3-13 新川 Front 大厦 网站:https://www.itsconnect-pc.org/ 成立日期:2014 年 10 月 28 日
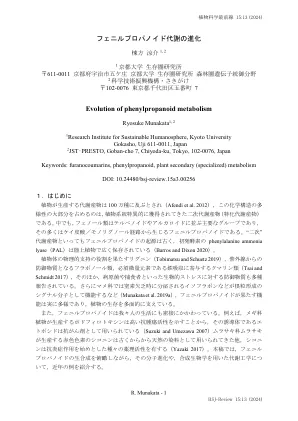
苯丙烷代谢的进化
图1。Mizutani等人编辑的肉桂酸/单胞醇途径和衍生型苯丙烷的示例,“学习植物化学的基础知识”。酶缩写:4Cl,4-Coumaroyl CoA连接酶; c3'h,p -coumaroyl shikimate/quinate 3-羟化酶; C4H,肉桂4-羟化酶; CAD,肉桂醇脱氢酶; ccOaomt,咖啡因coA o-甲基转移酶; CCR,肉桂二氧化碳减少; comt,caffeate o -methyltransferase; CSE,咖啡酰shikimate酯酶; F5H,试染5-羟化酶; HCT,羟基nnamoyl COA:光泽羟基霉素转移酶; PAL,苯丙氨酸氨裂解酶;塔尔,酪氨酸氨裂解。