XiaoMi-AI文件搜索系统
World File Search System内窥镜
胃肠内窥镜检查中的人工智能
人工智能 (AI) 正在迅速融入现代技术和临床实践。尽管还处于起步阶段,但 AI 已成为临床实践应用的热门研究课题。多个医学领域都已开始考虑未来 AI 辅助诊断和病理学应用的可能性。在胃肠病学领域,AI 已被研究作为辅助风险分层、诊断和病理鉴定的工具。具体而言,AI 已成为内窥镜检查领域的一大热门,因为它是一项具有巨大潜力的技术,有望彻底改变现代胃肠病学家的实践。从癌症筛查到自动报告生成,AI 已涉及现代内窥镜检查的各个方面。在这里,我们回顾了内窥镜检查中具有里程碑意义的 AI 发展。从广泛的定义开始,以加深理解,我们将总结 AI 研究的现状及其潜在应用。随着创新的快速发展,本文涉及自千禧年初首次评估以来 AI 辅助内窥镜检查的显著进步,以及这些 AI 模型可能对现代临床实践产生的潜在影响。与任何新技术的讨论一样,要成功应用临床 AI 工具,还必须了解其局限性。Clin Endosc 2020;53:132-141

胃肠内窥镜检查中的人工智能
将人工智能 (AI) 融入胃肠道 (GI) 内窥镜检查预示着胃肠道疾病管理的重大飞跃。人工智能应用,如计算机辅助检测和计算机辅助诊断,显著推进了胃肠道内窥镜检查,改善了早期检测、诊断和个性化治疗计划。人工智能算法在内窥镜数据分析方面表现出色,这对于传统上诊断灵敏度较低的疾病至关重要,例如不确定的胆道狭窄和胰腺癌。卷积神经网络与胆管镜检查或内窥镜超声相结合可以显著改善诊断过程,尤其是在检测恶性胆道狭窄和胆管癌方面。人工智能分析复杂图像数据并提供实时反馈的能力可以简化内窥镜检查程序,减少侵入性活检的需求,并减少相关不良事件。然而,人工智能的临床实施面临着挑战,包括数据质量问题和过度拟合的风险,这凸显了进一步研究和验证的必要性。随着技术的成熟,人工智能有望成为胃肠病学家不可或缺的工具,因此有必要将强大且经过验证的人工智能应用整合到常规临床实践中。尽管取得了显著的进步,但仍然存在诸如操作员依赖准确性和需要进行复杂检查等挑战。本综述深入探讨了人工智能在提高内窥镜诊断准确性方面的变革性作用,特别强调了其在胃肠道疾病的早期发现和个性化治疗中的实用性。

高斯煎饼:对现实的内窥镜重建
摘要。在结直肠癌诊断中,常规结肠镜检查技术面临着临界局限性,包括有限的视野和缺乏深度信息,这可能会阻碍检测预癌病变。当前的方法很难为结肠表面提供全面和策划的3D重建,这可以帮助最大程度地减少缺失的区域并重新进行癌前息肉。解决这个问题,我们介绍了“高斯煎饼”,这种方法利用了3D高斯分裂(3D GS)与经常基于神经网络的同时定位和映射(RNNSLAM)系统相结合。通过将几何和深度正则化引入3D GS框架 - 我们的方法可确保高斯与结肠表面更准确地对齐,从而使3D重建更加顺畅,并对详细的纹理和结构进行了新颖的观看。在三个Di-verse数据集中进行的评估表明,高斯煎饼增强了新型视图的合成质量,超过了当前的领先方法,PSNR增长了18%,SSIM提高了16%。它还提供了超过100×的更快渲染和超过10倍的培训时间,使其成为实时应用程序的实践工具。因此,这有望实现临床翻译,以更好地检测和诊断结直肠癌。代码:https://github.com/smbonilla/gaussianpancakes。

柔性内窥镜的抽样和培养:第一阶段
参考文献1。奥林巴斯。了解灵活内窥镜的抽样和培养的差异:为什么我们需要一种统一的方法。在线提供:https://infectionprevention.olympus.com/en-us/scientific-evid-ence/publications/nexpass-differences-smppling-smpling-ulturing。访问2023年2月2。奥林巴斯。针对内窥镜抽样和培养计划实施和管理的提示,技巧和见解。在线提供:https://infectionprevention.olympus.com/en-us/scientific-evidence/publications/sampling-and-culturing。2023年2月访问; 3。奥林巴斯。美国内窥镜研究:正确进行采样,培养和评估。在线提供:https://infectionprevention.olympus.com/en-us/scientific-evidence/publications/endoscopes-sampling-culturing。访问2023年2月
使用说明:灵活的内窥镜采样套件
产品柔性内窥镜采样试剂盒(FESK)产品内窥镜培养样品样品产品代码编号的通用名称(S)Fesk-200-200-200-200-200-200-200-230-400,FESK-230-400,FESK-230-600,FESK- FESK- 230-900,意图使用柔性式启动式的仪式和仪式的仪式,以收集Quills and sample®的样品。测试微生物的存在。如果存在,将量化生物体,并确定两个(2)个生物。如果需要/需要,可以额外收取其他生物体识别。此测试不能确保柔性内窥镜对患者使用的适用性。用于没有电梯机制的柔性内窥镜的细菌监视测试的产品范围。产品的关键规格样品收集容器(ClickTainer™)ClickTainer™标签剪刀Harmmark®
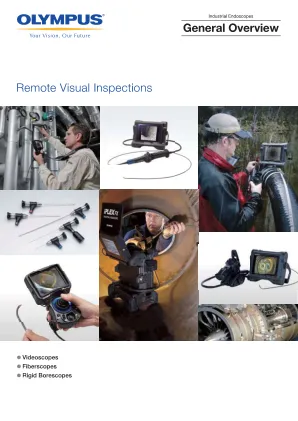
奥林巴斯工业纤维内窥镜宣传册
奥林巴斯技术使人们能够轻松准确地观察隐蔽部位,而不会破坏或干扰其外观。奥林巴斯通过其全面的工业内窥镜系列提供了更大的潜力。这个无与伦比的产品系列包括视频内窥镜、光纤内窥镜、硬式内窥镜、微型内窥镜和各种辅助设备,以满足您的特定要求。这些内窥镜均提供卓越的观察能力,这些能力是通过结合光学、精密工程和电子方面的专业知识实现的,这些专业知识是作为全球医疗内窥镜领域的领导者多年经验的结晶。考虑到易用性和耐用性,很明显,奥林巴斯工业内窥镜是质量控制和维护、自动检查、研发等的理想选择,可帮助您提高生产力、安全性和可靠性。

对接受内窥镜糖尿病患者的建议...
早餐在早上服用一半通常的剂量。省略午餐时间剂量。如果每天吃3至5次注射饮食后,在手术后的晚上服用通常的剂量,例如novorapid,humalog,actrapid,humulin s,apidra,fiasp,fiasp,持续胰岛素
降低胃肠道内窥镜检查中的3碳排放:“绿色内窥镜项目Würzburg”的前瞻性研究结果
胃肠道内窥镜产生的抽象客观碳排放已被认为是一个关键问题。范围3排放主要是由购买商品的制造,包装和运输引起的。据我们所知,旨在减少范围3排放的测量功效的前瞻性数据。 设计该研究是在中型学术内窥镜检查单元中进行的。 要求内窥镜消耗品的制造商回答有关制造,起源,包装和运输的问卷。 基于这些数据,尽可能购买替代产品。 此外,还指示工作人员如何避免浪费。 此后,购买的每个项目的碳足迹是从2月至2023年5月(干预期)计算的,并将范围3排放量与上一年同期(控制期)进行了比较。 结果26个40家公司回答了问卷。 322种产品中的229种被归类为不利。 对于47/229项(20.5%)来说,可以切换到替代项目。 1666在干预期间进行内窥镜检查,而对照期间进行了1751次检查(-4.1%)。 使用的仪器数量减少了10.0%(3111 vs 3457)。 使用较少和替代产品的碳排放量减少了11.5%(7.09 vs 8.01吨碳等效= TCO2 E)。 废物的分离导致20.1%的降低(26.55 vs 33.24 TCO2E)。 总共可以将碳排放量减少18.4%。据我们所知,旨在减少范围3排放的测量功效的前瞻性数据。设计该研究是在中型学术内窥镜检查单元中进行的。要求内窥镜消耗品的制造商回答有关制造,起源,包装和运输的问卷。基于这些数据,尽可能购买替代产品。此外,还指示工作人员如何避免浪费。此后,购买的每个项目的碳足迹是从2月至2023年5月(干预期)计算的,并将范围3排放量与上一年同期(控制期)进行了比较。结果26个40家公司回答了问卷。322种产品中的229种被归类为不利。对于47/229项(20.5%)来说,可以切换到替代项目。1666在干预期间进行内窥镜检查,而对照期间进行了1751次检查(-4.1%)。使用的仪器数量减少了10.0%(3111 vs 3457)。使用较少和替代产品的碳排放量减少了11.5%(7.09 vs 8.01吨碳等效= TCO2 E)。废物的分离导致20.1%的降低(26.55 vs 33.24 TCO2E)。总共可以将碳排放量减少18.4%。每个手术的结论使用较少的乐器,回收包装材料并改用替代产品可以减少碳排放,而不会损害内窥镜工作流程。
炎症性肠病内窥镜检查的人工智能
2 然而,集中阅读既耗时又费钱,在常规护理中的应用还不确定。即时客观的盲法 CAD 评估将解决这一限制,并有助于推进常规高质量内窥镜评分解释,以将其纳入治疗目标。CAD 可用于培训未来的胃肠病学研究员这一想法很有趣。目前的受训人员在进行 IBD 内窥镜检查时,有望达到准确解释内窥镜活动的能力。然而,他们的经验很大程度上是主观的,需要主管对内窥镜检查有深入的理解和准确的评分能力。使用人工智能对粘膜疾病活动进行标准化、准确和客观的评估可以实时验证他们的内窥镜评分解释,并识别和加强知识差距。第二个立场是 CAD 可以通过提高日常实践模式的成本效益来有益于疾病管理。由于 CAD 提供了一种
边缘人工智能无线视频胶囊内窥镜
胃肠道 (GI) 疾病是全球发病率和死亡率较高的原因,包括结肠直肠癌,结肠直肠癌在 50 岁以下成年人中的发病率不断上升。虽然可以通过定期筛查来缓解这一问题,但由于准确性和患者接受度不足,只有一小部分高风险人群接受了全面筛查。为了应对这些挑战,我们设计了一种人工智能 (AI) 无线视频内窥镜胶囊,其性能超越了现有解决方案,包括:(1) 使用板载深度神经网络 (DNN) 进行实时图像处理,(2) 通过部署白光和窄带成像增强粘膜层可视化,(3) 使用无线编程进行移动任务修改和 DNN 更新,以及 (4) 与患者的个人电子设备进行双向通信以报告重要发现。我们在体内环境中测试了我们的解决方案,将我们的内窥镜胶囊施用于全身麻醉的猪。所有在单一平台上成功实现的新功能都经过了验证。我们的研究为新一代胶囊内窥镜的临床应用奠定了基础,将显著提高上、下消化道疾病的早期诊断。