XiaoMi-AI文件搜索系统
World File Search System凉亭

雷达:
摘要 - 拉达值允许在复杂的环境中对旋转的FMCW雷达传感器进行准确的建模和模拟,包括对雷达波的反射,折射和散射的模拟。我们的软件能够实时处理大量对象和材料,使其适合在各种移动机器人应用程序中使用。我们通过一系列实验证明了雷达的有效性,并表明它可以在各种环境中更准确地再现FMCW雷达传感器的行为,与基于射线铸造的激光雷达样模拟相比,这些模拟器通常用于自主驱动器(例如Carla)。我们的实验还可以作为研究人员评估自己的雷达模拟的宝贵参考点。通过使用雷达,开发人员可以显着减少与原型和测试FMCW基于基于FMCW的算法相关的时间和成本。我们还提供了一个凉亭插件,该插件使移动机器人社区可以访问我们的工作。

2024 年业务计划和预算
• 新基础设施税 (NIL) 增加 200,000 美元,使年度税额达到 2,150,000 美元。这意味着一般税收增加 0.73%。年度 NIL 目标是 2,350,000 美元,这将有助于资助已知的近期新资本投资和/或升级资本投资。2024 年预算包括几个主要基础设施项目,这些项目将全部或部分由镇基础设施储备金资助。2024 年计划实施的项目包括:Lakewood Park South 洗手间、凉亭和水景、Maidstone 娱乐中心户外洗手间、CADA 图书馆建筑改进(延续 2023 年开始的工作)、Scully & St. Mark's 雨水泵站、PJ Cecile 雨水泵站、Lesperance Road Trail(CR 22 至 CR 42)和消防部门无线电系统。

混凝土 - 结构调查
Bassins à Flot 的湿船坞是波尔多港市的一大特色。作为该市北部地区重建的一部分,湿船坞已成为公共空间的主要区域。经过 18 个月的建设,其中一个重建项目最近已完工——由 Eiffage Construction Sud-Ouest 建造的 G7 和 G8 混合用途建筑。G8 地块占地 4300 平方米,由 Martin Duplantier Architects 设计,位于最后一段林荫大道和码头之间;这里设有一所商学院和零售店。其引人注目的是四个混凝土立面。该建筑的底层大部分为开放式,让人回想起该地块的工业历史,同时赋予其抽象、永恒的美感。一楼的两个大露台上覆盖着混凝土凉亭(如上图所示),为游客创造了有利于互动的空间。(照片:Schnepp Renou。)

自主叉车在混乱的物流工厂内导航
摘要:本文介绍了在打印工厂混乱且不断变化的环境中自动叉车导航应用程序的完整体系结构。根据可用导航轨道从现有的道路网络中选择全局路径。然后,一个本地路径规划仪与路径跟踪控制器相结合,可以使自主机器人导航。有限状态机器(FSM)体系结构确保在任务期间机器人的不同操作模式之间的过渡,包括避免障碍物。导航走廊是动态定义的,并通过跟踪控制约束的定义来尊重,并始终考虑安全有效的导航,并考虑到拥挤的工厂中叉车的空间约束。在ROS凉亭中模拟了一个叉车机器人及其环境,以验证该方法,然后在实际机器人原型上进行深入的实验,并在现实的操作场景中实时估算其实时性能。
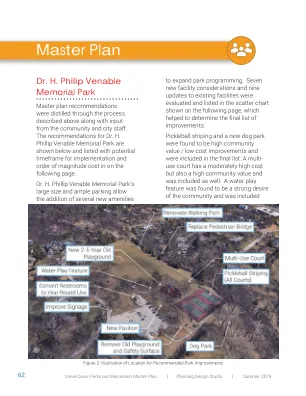
总体规划
现有设施的改进 时间范围 数量级 成本 重铺沥青路面 0-3 年 100-250K 美元 拆除旧游乐场和安全表面 0-3 年 < 25K 美元 改进标识 0-3 年 < 25K 美元 更换凉亭 0-3 年 25-100K 美元 将卫生间改为全年使用 0-3 年 < 25K 美元 更换人行天桥 3-6 年 25-100K 美元 更换网球场 6-10 年 100-250K 美元 新设施的考虑事项 时间范围 数量级 成本 狗公园 0-3 年 25-100K 美元 水上游乐设施 0-3 年 < 25K 美元 新建 2-5 年游乐场 0-3 年 25-100K 美元 匹克球场划线(所有球场) 0-3 年 < 25K 美元 多用途球场 3-6 年 100-250K 美元
配备扫描激光的林业机器人的自主导航
摘要:此摘要是我们目前正在进行的“创新森林计划”的研究项目的概述。该项目的目的是在种植后的第一年,尤其是机械除草剂而无需使用除草剂而自动化杨树种植园的传统手动任务。杨树林被认为是半结构化的环境,在该环境中,密集的冠层防止使用GPS信号和激光传感器,而不是局部使用激光传感器。在本文中,我们关注的主要功能之一:自主导航,其中包括检测和定位树木在如此复杂的环境中安全移动。自主导航需要精确且可靠的映射和本地化解决方案。在这种情况下,同时定位和映射(SLAM)是非常适合的解决方案。构造的地图可以可靠地用于计划移动机器人的语义路径,以便特定地对待每棵树。在凉亭和机器人操作系统(ROS)上进行的模拟证明,机器人可以在杨树林中自动导航。

新建单户住宅和复式住宅的场地规划要求 应准备、签署、注明日期和盖章的场地规划,并有现场签名和
15. 任何拟建基础和/或排水沟的位置及其起源点。16. 物业上安装的任何现有或拟建雨水径流处理、控制、排水结构或管道的位置。应注明所有雨水和下水道结构的底部、边缘和格栅高程。 17. 任何现有或拟议的地役权的位置(如适用) 18. 拟建房屋/地基的位置:建筑占地面积,应包括所有甲板、台阶、舱壁门、空调设备、封闭的机械设备、悬垂部分等。 19. 任何现有或拟议的附属建筑的位置,包括棚屋、车库、谷仓、凉亭、屏风房、庭院、温室、车棚、游泳池、发电机等。 20. 任何现有或拟议的车道的位置(注明坡度、宽度和表面材料) 21. 任何现有或拟议的挡土墙的位置(位置和高度) 22. 房产的任何其他重要结构或特征(石墙、岩架露头等) 建筑平面图:

高空:自适应无人机控制器测试床
空中无人机越来越被视为在安全关键环境中检查的宝贵工具。在采矿行动中,这对人类运营商带来了动态和危险的环境,这一点都没有。无人机可以在许多情况下部署,包括有效的测量以及搜救任务。在这些动态上下文中运行是在挑战,因此需要无人机控制软件在运行时检测和适应条件。为了帮助开发这样的系统,我们向我们提出的系统是一个模拟测试床,用于调查矿山中无人机的自适应控制器。Aloft使用凉亭利用机器人操作系统(ROS)和模型环境来提供基于物理的测试。仿真环境是由在矿山的物理模型中收集的3D点云构造的,并包含在现实世界中预期的特征。高举允许研究社区的成员将自己的自适应控制器部署到无人机的控制循环中

ACKR2缺陷型NK细胞增强CCR2的表达增加了肿瘤细胞治疗疗效
摘要:本文提出了一种基于视觉的障碍物避免自动自动驾驶汽车,可以使用单个RGB-D摄像头在仅CPU的设备上运行。该方法由两个步骤组成:视觉感知和路径计划。视觉感知部分使用Orbslam 3增强了使用光流量来估计汽车的姿势并从场景中提取丰富的纹理信息。在路径计划阶段中,提出的方法采用一种方法,将控制lyapunov函数和控制屏障功能结合起来,形式是二次程序(CLF-CBF-QP)以及障碍物形状重建过程(SRP)来计划安全稳定的轨迹。为了验证提出方法的性能和鲁棒性,使用凉亭模拟环境在各种复杂的室内环境中使用汽车进行了模拟实验。提出的方法可以有效地避免在场景中遇到障碍。所提出的算法在实现多个模拟场景的更稳定和较短的轨迹方面优于基准算法。

对象6D姿势识别和基于机器学习的抓握
摘要 - 6D姿势估计方法的研究对于增强机器人感知和操纵能力至关重要,尤其是在复杂的环境中。最初,我们在凉亭仿真环境中采用了深对象姿势估计(DOPE)项目来识别和掌握对象。但是,在高度混乱或遮挡的场景中,涂料表现出差的性能。为了应对这些挑战,我们转向了一种更强大的方法,并彻底检查了其基本的纸张和代码。计算资源和时间的限制,我们专注于一个对象,并调整了参数以加快培训和评估过程。我们成功地训练了密集型模型,进行了评估,并可视化了结果。我们将修改模型的性能与官方密集型模型进行了比较,观察到,尽管我们的调整提高了速度和可行性,但官方模型在评估和可视化任务方面的准确性和鲁棒性方面的表现优于我们的表现。此比较强调了在实际应用中模型优化与性能之间的权衡。