XiaoMi-AI文件搜索系统
World File Search System刚体

用于灵活飞机轨迹跟踪和负载减轻的非线性增量控制
本文提出了一种用于柔性飞机同时进行轨迹跟踪和负载减轻的非线性控制架构。通过利用控制冗余,可以在不降低刚体指令跟踪性能的情况下减轻阵风和机动负载。所提出的控制架构包含四个级联控制环路:位置控制、飞行路径控制、姿态控制和最优多目标机翼控制。由于位置运动学不受模型不确定性的影响,因此采用非线性动态逆控制。相反,飞行路径动力学受到模型不确定性和大气扰动的干扰;因此采用增量滑模控制。基于 Lyapunov 的分析表明,该方法可以同时降低传统滑模控制方法的模型依赖性和最小可能增益。此外,姿态动力学为严格反馈形式;因此采用增量反步滑模控制。此外,还设计了一种新型负载参考生成器,用于区分执行机动所需的负载和过载负载。负载参考由内环最优机翼控制器实现,而过载负载由襟翼自然化,而不会影响外环跟踪性能。通过空间轨迹跟踪任务和阵风负载缓解任务验证了所提出的控制架构的优点

纵向飞行动力学建模和稳定性... - eucass
可折叠机翼扑翼飞行器(FWA)是一种通过模仿昆虫、鸟类或蝙蝠等折叠机翼上下扇动来产生升力和推力的飞行器。近年来,仿生扑翼飞行器的研究日益增多,提出了多种结构形式的扑翼飞行器。扑翼飞行器的飞行环境与鸟类或大型昆虫相似,如低雷诺数的流体动力学和非定常气动[1,2] 。扑翼飞行器在飞行过程中,其运动学模型通常具有颤动、摆动、扭转和伸展4个自由度[3] 。Thielicke [4] 研究了不同弯度和厚度的鸟类臂翼和手翼在慢速飞行过程中的气动特性。仿生飞行器传统运动学模型仅考虑了颤振和扭转两个自由度。本文在传统飞行器运动学模型的基础上,增加了平面内折叠和非平面折叠两个自由度。本文四自由度运动学模型的气动建模方法是拟常数模型与考虑洗流效应的单元理论相结合。采用多刚体有限元法建立纵向动力学模型。采用Floquet-Lyapunov方法分析开环纵向稳定性。采用鲁棒变增益控制方法分析闭环纵向稳定性。
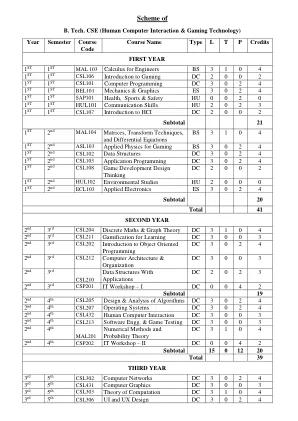
B. Tech. CSE(人机交互与游戏...
课程内容: 模块 1:基本概念 游戏物理 – 游戏引擎(简介)- 物理真实感 – 在游戏中的重要性、物理概念和游戏性能、基础知识 – 坐标系和参考系、标量和矢量、计算矢量大小、矢量叉积、矩阵 – 乘法和旋转、导数。 模块 2:基本牛顿力学和运动学 牛顿三运动定律 – 惯性 – 力 – 质量 – 加速度相等和相反的力、力矢量、力的类型 – 引力 – 摩擦力 – 向心力 – 力平衡和图表、功、能量 – 动能 – 势能 – 守恒 – 功率、平移运动 – 运动方程、旋转运动 - 扭矩 – 角加速度、2D 粒子运动学、3D 粒子运动学、刚体动力学。模块 3:抛射物抛射物属性、简单轨迹和重力、阻力、马格努斯效应 - 抛射物的旋转效应、游戏中的特定抛射物类型 - 炮弹 - 子弹 - 箭、可变质量。模块 4:碰撞:冲量和动量原理 - 线性和角冲量、弹性和非弹性碰撞冲击、恢复系数、碰撞方向和检测、与可移动和不可移动物体的碰撞、与摩擦的碰撞、2D 和 3D 碰撞、游戏应用。模块 5:物理建模:游戏车辆的物理学(飞机、轮船和小船、汽车和气垫船、枪支和爆炸、运动)教科书:1. 游戏程序员的物理学,

用于灵活飞机轨迹跟踪和负载减轻的非线性增量控制
本文提出了一种用于柔性飞机同时进行轨迹跟踪和载荷减轻的非线性控制结构。通过利用控制冗余,在不降低刚体指令跟踪性能的情况下减轻了阵风和机动载荷。所提出的控制结构包含四个级联控制环路:位置控制、飞行路径控制、姿态控制和最优多目标机翼控制。由于位置运动学不受模型不确定性的影响,因此采用非线性动态逆控制。相反,飞行路径动力学受到模型不确定性和大气扰动的干扰;因此采用增量滑模控制。基于 Lyapunov 的分析表明,该方法可以同时降低模型依赖性和传统滑模控制方法的最小可能增益。此外,姿态动力学为严格反馈形式,因此采用增量反步滑模控制。此外,设计了一种新型负载参考生成器,以区分执行机动所需的负载和过载负载。负载参考由内环最优机翼控制器实现,而过载负载由襟翼自然化,而不会影响外环跟踪性能。通过空间冯·卡门湍流场中的轨迹跟踪任务和阵风负载缓解任务验证了所提出的控制架构的优点。
柔性飞机轨迹的非线性增量控制……
本文提出了一种用于柔性飞机同时进行轨迹跟踪和载荷减轻的非线性控制结构。通过利用控制冗余,在不降低刚体指令跟踪性能的情况下减轻了阵风和机动载荷。所提出的控制结构包含四个级联控制环路:位置控制、飞行路径控制、姿态控制和最优多目标机翼控制。由于位置运动学不受模型不确定性的影响,因此采用非线性动态逆控制。相反,飞行路径动力学受到模型不确定性和大气扰动的干扰;因此采用增量滑模控制。基于 Lyapunov 的分析表明,该方法可以同时降低模型依赖性和传统滑模控制方法的最小可能增益。此外,姿态动力学为严格反馈形式,因此采用增量反步滑模控制。此外,设计了一种新型负载参考生成器,以区分执行机动所需的负载和过载负载。负载参考由内环最优机翼控制器实现,而过载负载由襟翼自然化,而不会影响外环跟踪性能。通过空间冯·卡门湍流场中的轨迹跟踪任务和阵风负载缓解任务验证了所提出的控制架构的优点。

研究入学考试教学大纲(RET)
部分 - I:基础研究方法I.数学方法特殊功能(Hermite,Bessel,Laguerre和Legendre功能)。傅立叶系列,傅立叶和拉普拉斯变换。复杂分析,分析函数的要素; Taylor&Laurent系列;两极,残留和积分评估。II。 经典力学中心力动作。 两次身体碰撞 - 散射在实验室和质量框架中心。 僵硬的惯性张量的刚体动力学。 非惯性框架和伪构造。 最少动作的原则。 广义坐标。 约束,拉格朗日和哈密顿的形式主义以及运动方程。 保护法律和循环坐标。 泊松支架和规范转换。 周期性运动:小振荡,正常模式。 相对论的特殊理论 - 洛伦兹转化,相对论运动学和质量 - 能量等效性。 iii。 电磁理论静电学:高斯定律及其应用,拉普拉斯和泊松方程,边界价值问题。 磁静态学:生物 - 萨瓦特定律,安培定理。 电磁诱导。 麦克斯韦的方程式和线性各向同性介质中的方程;接口处的字段上的边界条件。 标量和矢量电势,量规不变性。 在自由空间中的电磁波。 电介质和导体。 反射和折射,极化,菲涅尔定律,干扰,连贯性和衍射。 iv。 穿过障碍物。II。经典力学中心力动作。两次身体碰撞 - 散射在实验室和质量框架中心。僵硬的惯性张量的刚体动力学。非惯性框架和伪构造。最少动作的原则。广义坐标。约束,拉格朗日和哈密顿的形式主义以及运动方程。保护法律和循环坐标。泊松支架和规范转换。周期性运动:小振荡,正常模式。相对论的特殊理论 - 洛伦兹转化,相对论运动学和质量 - 能量等效性。iii。电磁理论静电学:高斯定律及其应用,拉普拉斯和泊松方程,边界价值问题。磁静态学:生物 - 萨瓦特定律,安培定理。电磁诱导。麦克斯韦的方程式和线性各向同性介质中的方程;接口处的字段上的边界条件。标量和矢量电势,量规不变性。在自由空间中的电磁波。电介质和导体。反射和折射,极化,菲涅尔定律,干扰,连贯性和衍射。iv。穿过障碍物。静态和均匀电磁场中带电颗粒的动力学。量子力学波颗粒偶性。schrödinger方程(时间依赖性和与时间无关)。特征值问题(盒子中的粒子,谐波振荡器等)。坐标和动量表示中的波函数。换向者和海森伯格的不确定性原则。dirac表示法。运动中心的运动:轨道角动量,角动量代数,自旋,添加角动量;氢原子。船尾 - 盖拉赫实验。

船舶疲劳寿命评估与预测...
本文介绍了 CETENA 和意大利海军开展的活动,通过自动船体监测系统评估新型 FREMM 护卫舰的行为,并通过专门开发的后处理工具分析记录数据来预测船舶结构的预期疲劳寿命。关键词:船体监测系统;疲劳;长期预测;决策支持系统;虚拟传感器。引言未来海军舰艇设计的实际主要目标是提高性能、强度和寿命,同时减轻重量、油耗、脆弱性和特征。尽管目前可用的设计工具(数值代码、FEM/BEM 模型等)为设计师提供了很大帮助,允许以相对有限的精力和时间探索出许多替代解决方案,但预测船舶在波涛汹涌的大海中的行为,特别是结构的疲劳寿命目前还无法以高成本实现。船上安装监测系统可以监测和记录与整艘船或局部结构相关的大量全尺寸数据。为了实现这一目标,意大利海军要求在 FINCANTIERI 设计和建造的新型 FREMM 护卫舰上安装船体监测系统 (HMS):本文描述的系统由 CETENA 设计和开发,符合附加船级符号 RINA MON-HULL+S。HMS 监测和记录船舶刚体运动、船体梁弯曲力矩、结构细节的局部应变、船舶结构细节经历的疲劳循环、作用于船体的压力、海况和船舶的运行条件等数据。
折叠翼扑翼飞行器纵向飞行动力学建模及稳定性分析
扑翼飞行器(flapping Wing Aircraft,简称FWA)是一种折叠机翼的飞行器,通过模仿昆虫、鸟类或蝙蝠等折叠机翼上下扇动来产生升力和推力的飞行器。近年来,仿生扑翼飞行器的研究日益增多,提出了多种结构形式的扑翼飞行器。扑翼飞行器飞行环境与鸟类或大型昆虫相似,如低雷诺数的类流体动力学和非定常气动动力学[1,2]。飞行过程中,扑翼生物的运动学模型通常具有颤振、摆动、扭转和伸展4个自由度[3]。Thielicke[4]研究了不同弯度和厚度的鸟类臂翼和手翼在慢速飞行过程中的气动特性。传统的仿生扑翼飞行器运动学模型只考虑颤振和扭转2个自由度。本文在传统四自由度折叠机翼运动学模型基础上,增加了平面内折叠和非平面折叠两个自由度,采用拟常数模型与考虑洗边效应的初始理论相结合的四自由度运动学模型气动建模方法,通过多刚体有限元法建立纵向动力学模型,采用Floquet-Lyapunov方法分析开环纵向稳定性,采用鲁棒变增益控制方法分析闭环纵向稳定性。

测量航空母舰弯曲以支持自主...
美国国防部正在开发的联合精确进近和着陆系统 (JPALS) 旨在使用与其他传感器增强的 GPS 为着陆在陆地和航空母舰上的军用飞机提供准确可靠的引导信息。对于陆基作业,将使用局部差分全球定位系统 (LDGPS) 技术,而对于航空母舰着陆,将采用舰载相对 GPS (SRGPS) 技术。在这两种情况下,最终系统的可靠性和完整性都至关重要。对于 LDGPS 的情况,情况类似于为民航实施的局部区域增强系统 (LAAS) [1],固定参考站生成差分 GPS 数据以发送给进场飞机。虽然 SRGPS 在概念上与 LDGPS 相似,但主要的实际区别在于参考接收器一直在运动,因为它们现在直接安装在航空母舰上。遗憾的是,由于操作限制,参考 GPS 天线无法安装在飞行甲板上飞机的预期着陆点 (TDP)。相反,它们通常安装在船舶的桁臂上。但是,由于进港飞机需要了解其相对于 TDP 的位置,因此需要将 GPS 测量结果几何平移到该点。此外,这种平移必须考虑所有船舶运动,最明显的是船舶的姿态变化。但是,在当前情况下,后一种假设可能没有完全合理。最终,实际上,GPS 参考站数据从桁臂到 TDP 的转换是使用两点之间假定的已知基线向量(例如从调查中获得)、船舶姿态知识以及船舶为刚体的假设来完成的。特别是在转弯或在波涛汹涌的大海中等高动态情况下,船舶可能会变形,本文称为船舶弯曲。
kazi Nazrul大学 - 物理系
系统。回顾拉格朗日形式主义; Lagarange方程的一些特定应用;小振荡,正常模式和频率。(5L)汉密尔顿的原则;变异的计算;汉密尔顿的原则;汉密尔顿原则的拉格朗日方程式; Legendre Transformation和Hamilton的规范方程;从各种原理中的规范方程式;行动最少的原则。(6L)规范变换;生成功能;规范转换的例子;集体财产; Poincare的整体变体;拉格朗日和泊松支架;无穷小规范变换;泊松支架形式主义中的保护定理;雅各比的身份;角动量泊松支架关系。(6L)汉密尔顿 - 雅各比理论;汉密尔顿汉密尔顿原理功能的汉密尔顿雅各比方程;谐波振荡器问题;汉密尔顿的特征功能;动作角度变量。(4L)刚体;独立坐标;正交转换和旋转(有限和无穷小);欧拉的定理,欧拉角;惯性张量和主轴系统;欧拉方程;重型对称上衣,带有进动和蔬菜。(7L)非线性动力学和混乱;非线性微分方程;相轨迹(单数点和线性系统);阻尼的谐波振荡器和过度阻尼运动; Poincare定理;各种形式的分叉;吸引子;混乱的轨迹; Lyaponov指数;逻辑方程。(6L)相对论的特殊理论;洛伦兹的转变; 4个向量,张量,转换特性,度量张量,升高和降低指数,收缩,对称和反对称张量; 4维速度和加速度; 4-Momentum和4 Force;