XiaoMi-AI文件搜索系统
World File Search System初始化
迈向数字化工程初始化...
图表列表 图 1:整个系统企业的数字化工程 (Zimmerman, 2015a) ........................................................ 16 图 2:水面舰艇声纳中的电子部件报废 (Sanborn, 2013) ........................................................ 19 图 3:随时间变化的生命周期成本累计百分比 (Walden et al., 2015) ............................................................. 20 图 4:1974 年至 2005 年飞机年平均成本上涨和通货膨胀指数 (Arena et al., 2008) ............................................................................................................................................. 21 图 5:系统准备程度及退化和适应性 (Enhancing Adaptability of U.S. Military Forces, 2011) ............................................................................................................................. 22 图 6:MBE 在整个采购生命周期中的优势 (Bergenthal, 2011) .................................................. 23 图 7:系统工程 Vee 模型 (Bray, 2010) .............................................................................. 25 图 8:MBSE 优势 (McDermott et al., 2020) ........................................................................................ 25 图 9:MOSA 的目标 (Zimmerman, Ofori, et al., 2018) ................................................................ 27 图 10:数字构造 (Kritzinger et al., 2018) ...........

基于价值的强化学习的持续乐观初始化
全面的国家行动探索对于加强学习(RL)算法至关重要。它使他们能够找到最佳解决方案并避免过早收敛。在基于价值的RL中,对价值函数的乐观初始化可确保足够的研究以找到最佳解决方案。乐观的值会导致好奇心驱动的探索,从而实现了未经探索的区域的访问。然而,乐观的初始化由于无法探索“无限易用”的探索,因此在恶化和非平稳环境中存在局限性。为了解决这一限制,我们提出了基于反复出现的乐观初始化的基于价值的RL的新型探索策略,表示硬币。通过注入持续的探索奖金,我们克服了乐观的不隔离(对环境噪声的敏感性)的缺点。我们提供了硬币与现有流行探索策略的严格理论比较,并证明它提供了一套独特的属性(覆盖范围,无限,通常不访问跟踪和好奇心)。我们揭示了硬币比普遍的玩具域上的现有策略的优越性,并在常见的基准任务上呈现结果。我们观察到,在六个基准任务中的四个中,硬币的表现优于现有的探索策略,同时与其他两个任务的最佳基线表现出色。

优化量子电路以实现任意状态的合成和初始化
摘要 — 为了将量子系统实际用于解决实际问题,需要将大量经典数据传输/编码到量子域。通常通过合成和初始化相应的量子态将任意经典数据编码到量子设备中。然而,当前的任意状态合成技术会产生深而复杂的量子电路,导致状态保真度低,并可能违反退相干约束。在这项工作中,我们提出了一种改进的方法和优化的电路,用于从给定的经典数据合成任意量子态。与现有方法相比,所提出的方法可产生具有较低门数、较低电路深度和高状态保真度的电路。通过在 MATLAB 和 IBM qasm 中进行模拟以及在 IBM 量子设备上的实际实现,对所提出的方法进行了评估。实验结果表明,与现有方法相比,门数和电路深度减少了一半。索引术语 — 量子计算,量子电路

History-Detr:利用历史信息和运动学优化查询初始化策略
最近的 3D 物体检测器利用多帧数据(包括过去和未来的数据)来提高性能。然而,他们采用的时间数据融合方法尚未充分挖掘其提高性能的潜力。现有的工作利用多帧数据,这些数据仅根据自我运动融合特定特征,并且由于巨大的计算和内存成本而无法直接应用于长序列。我们发现目前的方法不能有效地利用历史信息,包括历史预测和物体运动。基于我们的研究,我们提出了一种由历史查询和原始查询组成的新型混合查询公式。历史查询包括从历史预测和特征中获得的推断位置和内容查询,这些查询考虑了当前场景中所有物体的运动。此外,我们的方法可以简单地应用于其他类似 DETR 的模型中,以提高性能,而不会引入巨大的计算和内存成本。结果,我们的 History-DETR 在推理时间增加可忽略不计的情况下实现了显着的改进(+1.1% NDS)。

用平滑的贝尔曼方程式在最终奖励下初始化深Q学习
本文考虑了仅在达到某些最终状态(或此类实例的组成)时才能获得积极奖励的RL实例,例如迷宫探索出口时有大量积极的奖励。尽管这种设置显然受到限制,但本文指出,培训与一项政策相关的深层网络,然后仅通过平滑贝尔曼方程并添加对初始状态的积极限制,可以通过随机性或好奇心来完成,而在此设置中,即在0-loss假设下,就可以在0板的假设中表现出积极的阳性Q值,以至于是在0板的假设中(以下一个效果),因此它是在0-loss假设中的出现(以下是一个效果),因此它是在0板的假设中(以下是一个效果),因此一定是一个效果,因此,这是一个效果,因此,这是一个效果,以至于一定要么在0层状态下(以下情况下),因此,一定是一个效果。被锁定。从这种初始化中,可以使用包含通往良好出口的路径的重播缓冲区来完善经典的深Q学习。未来的作品应考虑此框架的实际实验。

想象、初始化和探索:多智能体强化学习中的有效探索方法
有效的探索对于在复杂的协调任务中发现多智能体强化学习 (MARL) 的最优策略至关重要。现有的方法主要利用内在奖励来实现承诺性探索,或者使用基于角色的学习来分解联合动作空间,而不是直接在整个动作观察空间中进行集体搜索。然而,它们在获取特定的联合动作序列以在长期任务中达到成功状态时经常面临挑战。为了解决这一限制,我们提出了想象、初始化和探索 (IIE),这是一种新颖的方法,为复杂场景中的高效多智能体探索提供了一种有前途的解决方案。IIE 采用变换器模型来想象智能体如何达到可以影响彼此转换函数的临界状态。然后,我们在探索阶段之前使用模拟器初始化此状态下的环境。我们将想象表述为序列建模问题,其中状态、观察、提示、动作和奖励是自回归预测的。该提示由剩余时间步长、剩余返回值、影响力值和一次性演示组成,用于指定期望状态和轨迹并指导动作生成。通过在关键状态下初始化智能体,IIE 显著提高了发现潜在重要且未被充分探索区域的可能性。尽管方法简单,但实证结果表明,我们的方法在星际争霸多智能体挑战赛 (SMAC) 和 SMACv2 环境中的表现优于多智能体探索基线。尤其值得一提的是,与其他生成方法(例如 CVAE-GAN 和扩散模型)相比,IIE 在稀疏奖励 SMAC 任务中表现出色,并且在初始化状态下生成了更有效的课程。

光学自旋初始化和读数,并在平面磁场中使用腔耦合量子点
耦合到光腔的带电半导体量子点(QD)的自旋是高限制自旋 - 光子接口的有前途的候选者;腔体有选择地修饰光学跃迁的衰减速率,以便在单个磁场几何形状中可以旋转初始化,操纵和读数。通过执行空腔QED计算,我们表明具有单个线性极化模式的空腔可以同时支持高实现的光学自旋初始化和读数,并在单个平面内(VOIGT几何学)磁场中同时支持。此外,我们证明了单模型腔始终在实验性良好的驾驶方案中胜过双峰腔。我们的分析与VOIGT几何形状结合了既定的控制方法,为高实现初始化和读数提供了最佳参数制度,并在两种腔体配置中提供了一致的控制,并为QD Spin-Photone Interface的设计和开发提供了QD Spin-Phot-Phot-Phot-Phot-Phot-Phot-Phot-Photone Interface的洞察力。

GDAS驱动的机器学习天气预测:一项与GDAS始于全球天气预测初始化的图形广播的比较研究
对全球天气的中等程度预测在各个社会和经济领域的决策过程中起着关键作用。近年来,在天气预测中的机器学习(ML)模型应用程序的迅速发展,与传统的数值天气预测(NWP)模型相比,表现出色的性能显着。这些剪边模型利用了多种ML架构,例如图形神经网络(GNNS),卷积神经网络(CNN),傅立叶神经操作员(FNOS)和变压器。值得注意的是,Google DeepMind开创了一种基于ML的新方法,称为GraphCast,从重新分析数据中直接培训,并在不到一分钟的时间内促进了对众多天气变量的全球预测。令人印象深刻的是,图形播放预测在预测恶劣天气事件方面的准确性提高,包括热带气旋,大气河流和极端热量等现象。但是,Graphcast的效率依赖于高质量的历史天气数据进行培训,通常来自ECMWF的ERE5重新分析。
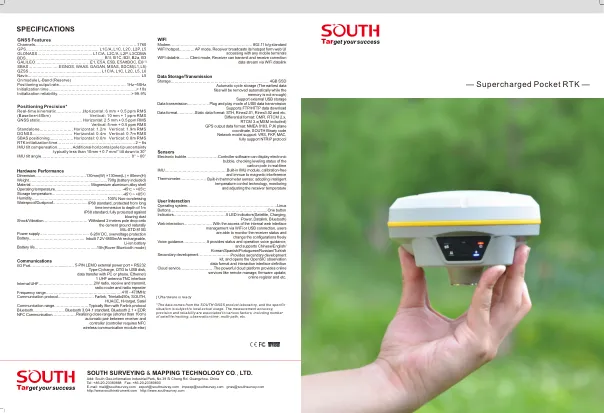
Galaxy G3 (Spt) 20220426.cdr
GNSS 特性 通道…………………………………………………………………… GPS………………………….……………........ GLONASS…………....…........................ BDS…………................................................... GALILEO…..……………………………………. SBAS…….... QZSS…...………………………….......................... Navic................................................................................................ 在模块 L-Band(预留) 定位输出速率………………………………………………. 初始化时间…..………………………………………………………… 初始化可靠性…..……………………………………………….