XiaoMi-AI文件搜索系统
World File Search System前视

单视3D场景重建具有高保真形状和纹理
为了进一步缓解从单视输入中恢复3D形状的歧义,我们遵循Yu等人。[84]以实现单眼,正常和分割提示,以促进训练过程。但是,由于这些图像在3D-Front [19]数据集中不可用,因此我们使用场景的3D扫描,对象的3D CAD模型以及摄像机在数据集中提供的内在和外在的pa-rameters进行调整。pix3d [69]数据集提供实例分割,但缺乏深度和正常图像。由于渲染是不可能的,因此我们将估计的深度和正常地图用作最先进的估计器的伪基真实[17]。请注意,在训练阶段的过程中,深度,正常和分割信息仅用于指导模型的学习过程,而在推理阶段则无需。这种调查表明,我们的模型仍然灵活且适用于各种情况。

一项在复视的大鼠模型中的研究-Würzburg
1神经病学系,大学医院和Julius-Maximilians-Universitätwürzburg,Josef-Schneider-STR。 11,97080 Dem,德国Würzburg; pozzi_n2@ukw.de(N.G.P. ); ip_c@ukw.de(c.w.i. ); volkmann_j@ukw.de(J.V.) 2人类大学生物医学科学系,Pieve Emanuele,20072年意大利米兰; francesco.bolzoni@unimi.it 3分子生物成像与生理学研究所,CNR,通过Fratelli Cervi 93,20090意大利米兰; gembiella@gmail.com 4 Centro Parkinson E Parkinsonismi,Asst G. Pini-Cto,20072年意大利米兰; pezzoli@parkinson.it 5病理生理学和移植系,人类生理学科,degli decli di Milano大学,通过Mangiagalli 32,20133,20133年意大利米拉诺; paolo.cavallari@unimi.it 6解剖学和细胞生物学研究所,Julius-Maximilians-Universitätwürzburg,Koellikerstr 6,97070Würzburg,德国; esther.asan@uni-wuerzburg.de *通信:isaias_i@ukw.de1神经病学系,大学医院和Julius-Maximilians-Universitätwürzburg,Josef-Schneider-STR。11,97080 Dem,德国Würzburg; pozzi_n2@ukw.de(N.G.P. ); ip_c@ukw.de(c.w.i. ); volkmann_j@ukw.de(J.V.) 2人类大学生物医学科学系,Pieve Emanuele,20072年意大利米兰; francesco.bolzoni@unimi.it 3分子生物成像与生理学研究所,CNR,通过Fratelli Cervi 93,20090意大利米兰; gembiella@gmail.com 4 Centro Parkinson E Parkinsonismi,Asst G. Pini-Cto,20072年意大利米兰; pezzoli@parkinson.it 5病理生理学和移植系,人类生理学科,degli decli di Milano大学,通过Mangiagalli 32,20133,20133年意大利米拉诺; paolo.cavallari@unimi.it 6解剖学和细胞生物学研究所,Julius-Maximilians-Universitätwürzburg,Koellikerstr 6,97070Würzburg,德国; esther.asan@uni-wuerzburg.de *通信:isaias_i@ukw.de11,97080 Dem,德国Würzburg; pozzi_n2@ukw.de(N.G.P.); ip_c@ukw.de(c.w.i.); volkmann_j@ukw.de(J.V.)2人类大学生物医学科学系,Pieve Emanuele,20072年意大利米兰; francesco.bolzoni@unimi.it 3分子生物成像与生理学研究所,CNR,通过Fratelli Cervi 93,20090意大利米兰; gembiella@gmail.com 4 Centro Parkinson E Parkinsonismi,Asst G. Pini-Cto,20072年意大利米兰; pezzoli@parkinson.it 5病理生理学和移植系,人类生理学科,degli decli di Milano大学,通过Mangiagalli 32,20133,20133年意大利米拉诺; paolo.cavallari@unimi.it 6解剖学和细胞生物学研究所,Julius-Maximilians-Universitätwürzburg,Koellikerstr 6,97070Würzburg,德国; esther.asan@uni-wuerzburg.de *通信:isaias_i@ukw.de

为视障人士提供的智能个人 AI 助理
基于特征提取的盲人物体识别 [4]。SIFT(尺度不变特征)算法被提出来实现该解决方案。它不需要任何形式的图像转换。进行预处理以消除噪声和不均匀照明造成的挑战。然后借助局部特征提取方法找出兴趣点,并为其计算特征或向量和描述符。该算法有助于将图像表示为图像的兴趣点集合,这些图像对图像变换不变且对照明变化有部分影响。它克服了以前实现 RGB 到 HSI 转换的缺点,因为图像的复杂性不会影响性能。但是,所使用的算法是闭源的,很难在不同设备上实现。

宣传单_海康威视AI开放平台V2
海康威视 AI 开放平台旨在解决不同垂直市场的实际挑战,满足各种特定的用户需求。该平台为最终用户提供了一个算法模型库,通过输入样本图像来训练自己的 AI 算法。然后,用户可以将这些模型加载到各种形式的海康威视产品上。该平台还具有私有化部署、低学习成本、友好的用户界面和加速算法应用等特点,允许最终用户定制适合自己需求和场景的 AI 算法,同时确保数据隐私得到良好保护。
数据库错误对通视性估计的影响 * - ASPRS
摘要 数字地形数据库最常见的用途之一是评估空间中各点之间的通视性或清晰视线。这些评估通常用于做出有关设备或人员部署的决策。但是,数据库和真实地形之间会存在误差或差异,并且由于这些差异,现场的可见性将与使用数据库预测的可见性不同。本文介绍了一种在给定误差规范的情况下计算区域可见性概率的方法。结果显示了可见性不确定性对数据库误差和地形粗糙度的敏感性。讨论了对其他参数的敏感性。结果表明,数据库非常适合预测遮蔽,但对于预测可见性则不太可靠。此外,可见性预测的可靠性会随着地形粗糙度的增加而增加。

1型糖尿病控制不良的儿童的视神经炎:病例报告
膀胱癌是全球最常见的恶性肿瘤之一。标准的新辅助或转移性疗法曾经是基于顺铂的化学疗法,但由于年龄,肾功能障碍或脆弱,许多患者没有资格。检查点抑制剂(例如Atezolizumab和pembrolizumab)增强了顺铂符合条件的患者的存活率。最初在基于铂的化学疗法后被批准为患者的二线治疗,Nivolumab经FDA批准,用于在检查员274试验后,用于辅助治疗高风险的肌肉炎性尿路上皮癌。这是针对切除的疾病或顺铂不合格的患者的。最近的发展是基质的纳维洛姆单抗对结局的贡献,这是对阿托佐伊珠单抗作为一种单一疗法或肌肉侵入性膀胱癌的组合的持续调查的补充,为改善控制提供了进一步的希望。
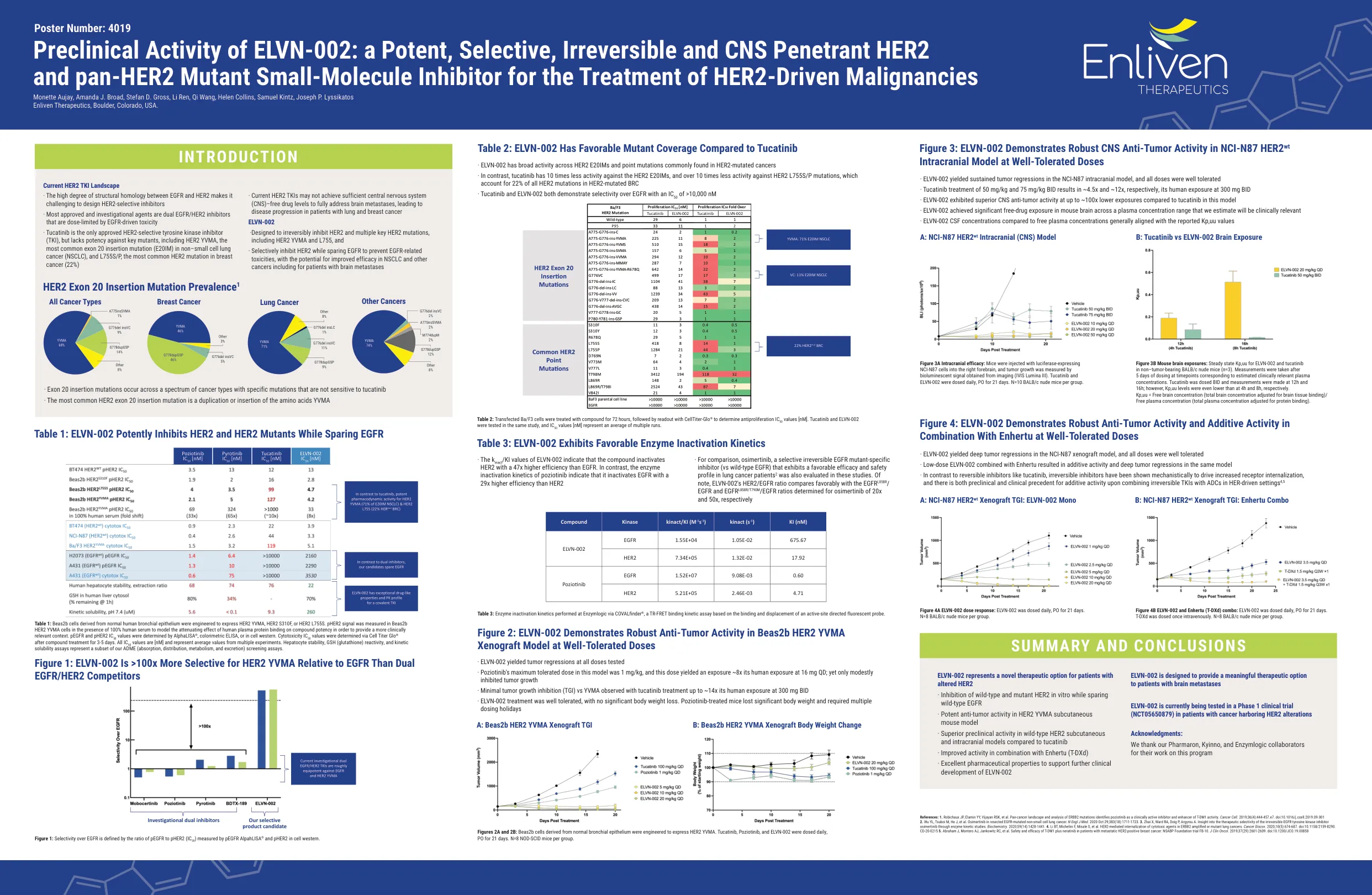
ELVN-002的临床前活动ELVN-002的临床前活动
表1:衍生自正常人支气管上皮的BEAS2B细胞被设计为表达HER2 YVMA,HER2 S310F或HER2 L755。PHER2信号,以建模人血浆蛋白结合对复合效力的衰减作用,以提供更临床相关的环境。PEGFR和PHER2 IC 50值通过alphalisa®,比色ELISA或细胞西部确定。细胞毒性IC 50值是通过复合处理后通过细胞滴度GLO®确定的3-5天。所有IC 50值都是[NM],代表来自多个实验的平均值。肝细胞稳定性,GSH(谷胱甘肽)反应性和动力溶解度测定代表了我们ADME(吸收,分布,代谢和排泄)筛选的子集。

