XiaoMi-AI文件搜索系统
World File Search System割草

基于图像分割的草坪割草机器人的边界识别
准确地识别草坪边界是草坪割草机器人的可行操作的基础。当前的草坪边界识别方法依赖于预埋的电缆或通过RTK-GPS定位技术绘制边界。两种方法都容易受到定位错误和环境变化的影响。实时识别基于图像的草坪边界的实时识别可以在路径计划和对草坪割草机器人的边界识别之间形成实时闭环,从而提高了机器人工作的鲁棒性和可靠性。U-NET网络是一个简单的图像分割模型,适用于具有有限计算资源的机器人。但是,草坪的二元分割的结果通常是开放的边界线,这与医学图像中U-NET模型的某些多闭合单元的结果不同。因此,很难将U-NET模型直接应用于准确的草坪分割。考虑到草坪图像的特征和有限的计算资源,本文引入了具有通道空间注意机制和变化的损耗函数的改进的U-NET模型,这更好地解决了草坪边界识别的问题。改进模型的MDICE值为97.7%,比原始U-NET模型高约2%。

太阳能自动割草和农药喷洒机器人
由于自由化和全球化,农业部门正在改变人口的社会经济环境。大约 75% 的人生活在农村地区,仍然依赖农业。农业一直是印度经济的支柱。喷洒农药是农业中保护农作物免受昆虫侵害的一项重要任务。农民主要使用手动或燃油驱动的喷雾泵来完成这项任务。这种传统喷雾器由于体积过大、结构笨重,容易导致用户疲劳。这促使我们设计和制造一种基本上是基于推车的太阳能割草机、农药喷雾器和照明系统合二为一的模型。由于使用太阳能来操作泵和割草机,将不再需要燃油驱动的喷雾泵和割草机的发动机,从而减少振动和噪音。
Robo -Golf -Sterf.org
在每个课程中,一个指定的公平方式,选择了一个粗糙的示范试验试验。发现草皮质量的很少有显着差异,并且发现了杂草和疾病的覆盖范围。在八月和9月的大雨和高增长的时期,在某些课程中发现了带有机器人割草的草皮质量。课程经理的看法是,割草的质量很高,并且机器人的割草在粗糙的情况下也很出色。机器人拆除了露水,几乎没有剪报,并且可以分配给高尔夫球场的其他任务。机器人割草的头几年是一个学习过程,面临着舰队服务的挑战,可以在课程中发电(最终是太阳能)以及一种新的维护方式和新工具(照片2)。
对草皮机器人系统的全面审查
I.引言维护草坪和室外空间历史上是一项耗时且苛刻的努力,需要手动劳动或使用传统的汽油驱动的割草机。这些传统方法不仅消耗了大量的人类努力,而且通过燃料排放有助于噪声污染和环境降解。但是,机器人技术和自动化技术的最新进步通过引入草皮机器人系统彻底改变了草坪护理实践。割草机器人系统代表着向自动化草坪护理解决方案的重大转变。这些系统旨在自主驾驶室外环境,检测障碍,并有效地割草,而无需人工干预。通过整合机器人,传感器,导航系统和复杂控制算法等尖端技术,这些机器人提供了一系列功能,可提高草坪维护任务的效率,精度和可持续性。本文旨在详细概述割草机器人系统,深入研究其基本组成部分,功能,收益和挑战。通过对从早期原型到高级机器人割草机的这些系统的演变进行详细检查,该综述将突出推动其发展的技术进步。此外,该论文将探讨割草机器人系统的优势,例如降低人工成本,环境福利以及提高草坪护理业务的总体效率。此外,本综述将解决与割草机器人系统相关的挑战和局限性,包括初始投资成本,导航复杂性和监管考虑因素。通过严格分析这些因素,本文将提供有关自动化草坪护理技术现状的见解以及未来研究和发展的潜在途径。总的来说,这项全面的审查旨在阐明割草机器人系统对草坪护理景观的变革性影响,并强调它们在现代户外空间管理中作为可持续,高效和创新的解决方案的作用。

S.F.第75号 - 运输部的自治割草机技术研究(由A-1修正案修订)作者:参议员John R. JasinskiS.F.第75号 - 运输部的自治割草机技术研究(由A-1修正案修订)作者:参议员John R. Jasinski
S.F. 编号 75 - 交通运输部的自动割草机技术研究(A-1修正案修订)作者:参议员约翰·R·贾辛斯基(John R. 75要求运输部(“ MNDOT”)对自动割草技术进行研究,这些割草技术是机器人或自动化的设备,旨在使用编程或预定义的途径砍伐草或植被,以最大程度地减少对人类干预的需求。 第1节要求专员研究其他政府或私人实体的自主割草行动,以确定是否可以在MNDOT拥有的财产或财产上部署此类系统。 研究必须研究不同的配置和类型的自主割草机,以确定它们是否可以围绕障碍或艰难的地形进行操作。 如果MNDOT选择购买割草机作为研究的一部分,则必须从明尼苏达州公司购买该技术。 需要在2027年2月15日之前立法报告。 第2节在2026财政年度从Trunk Highway基金会拨款15万美元,用于研究和购买自动割草机。S.F.编号75 - 交通运输部的自动割草机技术研究(A-1修正案修订)作者:参议员约翰·R·贾辛斯基(John R.75要求运输部(“ MNDOT”)对自动割草技术进行研究,这些割草技术是机器人或自动化的设备,旨在使用编程或预定义的途径砍伐草或植被,以最大程度地减少对人类干预的需求。第1节要求专员研究其他政府或私人实体的自主割草行动,以确定是否可以在MNDOT拥有的财产或财产上部署此类系统。研究必须研究不同的配置和类型的自主割草机,以确定它们是否可以围绕障碍或艰难的地形进行操作。如果MNDOT选择购买割草机作为研究的一部分,则必须从明尼苏达州公司购买该技术。需要在2027年2月15日之前立法报告。第2节在2026财政年度从Trunk Highway基金会拨款15万美元,用于研究和购买自动割草机。

太阳能割草机的开发及性能评估
由于燃料成本不断上涨以及燃料燃烧后向大气中排放气体的影响,必须使用来自太阳的丰富太阳能作为驱动割草机的动力源。根据割草的一般原理,设计和开发了一台太阳能割草机。设计的太阳能割草机由直流 (DC) 电机、可充电电池、太阳能电池板、不锈钢刀片和控制开关组成。对开发的机器在不同刀片厚度和不同切割高度下的性能进行了评估。发现,当刀片厚度为 3 毫米和 5 毫米、切割高度为 50 毫米时,机器的最大田间效率为 78.06%,当刀片厚度为 4 毫米、切割高度为 25 毫米时,最小田间效率为 71.93%。割草机的最大有效田间容量为 0.0306 公顷/小时,刀片厚度为 3 和 5 毫米,割草高度为 50 毫米;最小有效田间容量为 0.0282 公顷/小时,刀片厚度为 4 毫米,割草高度为 25 毫米。空载条件下观察到的功耗为每片刀片 36 瓦。负载条件下的最大功耗为 264 瓦,刀片厚度为 5 毫米,割草高度为 25 毫米;负载条件下的最小功耗为 3 毫米,刀片厚度为 50 毫米。
南安普敦绿色空间因子指南2024
大多数植被是草,通常是短割草的,例如在便利空间中,草原,尤其是在城市地区发现的舒适草原,其土壤压实程度高于林地和灌木丛。这导致土壤孔的损失,这进一步阻碍了水渗透并减少了可以持有的水量。短割草的草原的水衰减能力低于更长的草,因为缺乏空中植被意味着对土壤几乎没有保护,因此它很快就会干燥。这会导致坚硬的表面,水简单地流出。在SCC中,减少了近割草的草原的含量,而有利于富含草地的草原物种。但是,需要娱乐,我们鼓励包括娱乐在内的健康生活方式。我们正在寻求资助必需的分解(通过加压空气注射)来改善事件足迹和车辆损坏压实的草地的孔隙率和气态交换。
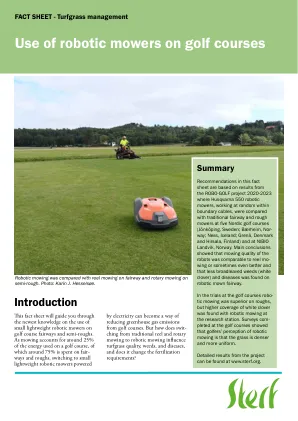
在高尔夫球场上使用机器人割草机-STERF.org
此情况说明书中的建议是基于2020-2023的Robo-Golf项目的结果,其中Husqvarna 550机器人割草机在边界电缆内随机工作,与传统的球道和五个北欧高尔夫球场的粗糙割草机进行了比较(Jönköping,瑞典,瑞典;挪威的尼比奥·兰德维克(Nibio Landvik)。的主要结论表明,机器人的割草质量与卷轴或有时甚至更好,并且在机器人割草的球道上发现了较少宽阔的杂草(白色三叶草)和疾病。

使用Arduino Uno
在当今世界,园艺和草坪维护对于创造美学上令人愉悦的空间和健康的环境至关重要。然而,传统的割草方法,例如使用手动推动割草机或汽油驱动的割草机,不仅是劳动密集型的,而且由于其排放而对环境有害。对生态友好和自主技术的需求的增加促使人们对此类任务的自动化和可再生能源的兴趣。该项目旨在开发一种基于Arduino的草切割机器人,该机器人利用蓝牙进行遥控器和太阳能系统来使机器人在能源方面自给自足。机器人将自动浏览草坪并有效地割草,从而消除了对人类持续干预的需求,同时最大程度地减少了环境影响。机器人将由太阳能电池板,电池和切草电机的组合提供动力。它将配备用于控制的Arduino Uno,用于无线通信的蓝牙,运动直流电动机以及用于控制电动机的电动机驱动器。将这些组件集成到粘性系统中将确保有效,环保和自主的割草解决方案。这个机器人系统有望通过减少劳动力成本,节省时间并通过使用太阳能来促进可持续性来彻底改变草坪护理。