XiaoMi-AI文件搜索系统
World File Search System动作
Ankara University Tubitak-Cost动作...
作为安卡拉大学,我们定期评估和改进我们的研究政策,以确保我们的科学研究的连续性,并在国家和国际领域的学术成就中进一步提高我们的学术成就。在这种情况下,TübiTak-Cost(欧洲科学与技术合作)是一种重要的支持机制,可以携带从事我们大学中从事工作的科学家的工作,并增加他们将为我们的大学提供的科学贡献。成本行动鼓励通过将国际研究人员汇集到自己的领域来增加研究人员之间的知识和经验。因此,我们大学的科学家不仅会提高他们在国际舞台上的科学能力,而且还将由于他们的知识和知识而进一步提高我们的大学。 在这项研究中,为了为我们的大学科学家的国际学术表现做出贡献,其目的是评估成本行动的要求与我们学术单位的能力之间的遵守情况,并进行适当的配对。因此,我们大学的科学家不仅会提高他们在国际舞台上的科学能力,而且还将由于他们的知识和知识而进一步提高我们的大学。在这项研究中,为了为我们的大学科学家的国际学术表现做出贡献,其目的是评估成本行动的要求与我们学术单位的能力之间的遵守情况,并进行适当的配对。
Burnaby气候动作框架
对于各个级别的政府而言,共同努力解决气候变化及其影响很重要,但与我们的居民和社区合作伙伴合作对我们来说同样重要。气候变化对社区很重要。通过城市弹性期货倡议,由17个承诺的公民组成的队列使他们的社区参与了关于气候变化的对话,并制定了本那比气候气候行动指南。此外,一个由40名居民组成的本那比社区大会为Burnaby的官方社区计划提出了24个建议,其中一些表达了减少运输排放并创造更多绿色空间的需求。
![运动学:描述航天器的动作[1]](/simg/d\d8cebefeddb0c20967f1027ea728bbc6868f5a37.webp)
运动学:描述航天器的动作[1]
必须先精确地预测和控制空间中的物体(例如航天器,卫星和太空站),以确保安全性和有效性。运动学是一个在3D空间中对这些身体运动的描述和预测的领域。运动学课程涵盖了四个主要主题领域:粒子运动学介绍,深入研究了两个部分的刚性身体运动学(从使用定向余弦矩阵和欧拉角的经典动作描述开始,并以现代描述仪的综述,例如Quaternions和quaternions and Classical and Classical and Modified Rodrigues参数)。课程以查看静态态度的确定结束,使用现代算法来预测和执行太空中身体的相对取向。

神经类固醇的多方面动作
Alfaxalone Covey Lab(Tesic等,2020)Ganaxolone Covevey Lab(Hogenkamp等,1997)3α5βPCCovevee Lab(Mennerick等,2001)CDNC24 COVEN COVEY LAB(TESIC等,2020)ECN COVEY LAB(TODOROV LAB) B372 Covey Lab(Han等,1996)MQ34 Covey Lab(Qian等,2014)MQ35 Covey Lab(Qian等,2014)MQ2221 Covey Lab(Ziolkowski et al。,2020) https://www.rdkit.org/ chemdraw 22.2.0 GraphPad Prism 10.4.0数据库药物重新利用中心
气候动作监视器2024
归因4.0国际(CC BY 4.0)此工作可根据创意共享归因4.0国际许可提供。通过使用这项工作,您可以接受该许可条款的约束(https://creativecommons.org/licenses/4.0/)。归因 - 您必须引用工作。翻译 - 您必须引用原始作品,确定对原始文本的更改,并添加以下文本:如果原始作品和翻译之间有任何差异,则仅应将原始作品的文本视为有效。改编 - 您必须引用原始作品并添加以下文本:这是经合组织对原始作品的改编。本适应中表达的意见和论点不应报告为代表经合组织或其成员国的官方观点。第三方材料 - 许可证不适用于工作中的第三方材料。如果使用这种材料,则负责获得第三方的许可以及任何侵权索赔。未经明确许可,您不得使用经合组织徽标,视觉标识或封面图像,也不得建议经合组织认可您对工作的使用。根据本许可引起的任何争议均应按仲裁根据2012年常任仲裁法院(PCA)仲裁规则解决。仲裁的所在地应为巴黎(法国)。仲裁员的数量应为一个。
英格兰泥炭动作计划
1在这种情况下负责的管理是管理活动,并不试图重新建立泥炭栖息地,而是大大降低了为此目的使用泥炭地的影响。是针对不可行的情况。该术语需要进一步的定义,并且将是特定于土地使用的。在低地农业泥炭地中,这可能涉及改变水管理,并有可能大大减少温室气体的排放并减少土壤的损失,同时为农民提供创新和探索新市场的机会。2泥炭地恢复应被视为一个过程,而不是一次性修复事件。peatland遗址的恢复活性不应立即被描述为恢复(或处于良好的水文条件)。恢复过程将开始启动,但是自然系统将需要时间恢复并实现恢复状态。同时,只要持续的管理实践对恢复最终目标表示同情,并允许该站点继续其恢复轨迹,就可以描述为这些泥炭地。
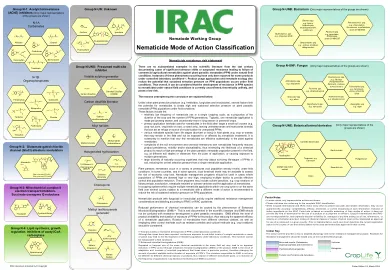
nematicide动作分类模式
植物寄生线虫在田间条件下发生在多种压力(土壤种群密度水平)中。在某些国家和某些物种中,可以使用局部阈值水平来评估经济作物损失的风险。线虫管理程序应在PPN人群认为高或很高的情况下使用多种策略来提供有效的控制和人口减少。这些计划可能包括文化实践,例如作物旋转或下沉时期,阳性,线虫抗性或耐受品种以及甲状酸酯的应用。在一个农作物系统中需要多个nematicide应用在一个农作物周期内或在几个循环中的同一田地上,建议采用不同的作用方式旋转到nematicide,以降低对PPN种群持续选择压力的风险。

生成图像作为动作模型
摘要:图像生成扩散模型已经过微调,以解锁新功能,例如图像编辑和新型视图合成。我们可以类似地解锁视力控制的图像生成模型吗?我们提出了G Enima,这是一种行为粘合剂,将稳定扩散到“绘制关节运动”作为RGB图像的目标。这些图像被馈入一个控制器,将视觉目标映射到一系列关节位。我们在25个rlbench和9个现实的操纵任务上研究G尼马。我们发现,通过将动作提升到图像空间中,Internet预训练的扩散模型可以生成优于状态的视觉运动方法的策略,尤其是在对场景扰动的鲁棒性和对新颖对象的推广方面。尽管缺乏深度,关键点或运动规划剂等先验,我们的方法也与3D代理具有竞争力。

背景信息电子动作是我们的驾驶...
雷根堡,2024年6月26日,社会和经济框架当前的十年的特点是移动性向电气化驱动系统转移。全球对全球变暖和空气污染的认识正在增长。这不仅在立法层面(更严格的法规),而且在更广泛的人群(对环保技术的需求)中导致了明显的方向变化。在个体迁移率领域,电气化车辆驱动器被认为是清洁,无局部发射且高效的迁移率最重要的技术先驱。电气化的挑战之一是同时以不同形式需要它,因为它旨在支持汽车制造商的几个战略目标,以遵守计划中的CO 2车队限制。因此,他们需要针对不同车辆细分市场和价格类别的具有成本效益的解决方案,以便能够尽可能满足所有客户的用例。除了电池供电的车辆外,电气化还可以启用低压和高压混合动力车,以及带有燃料电池的电动汽车作为能量转换器。和未来车辆架构的共同点是电动驱动器。专家预测