XiaoMi-AI文件搜索系统
World File Search System动作的


重新思考愿景和行动 - 加州大学伯克利分校心理学
5.1. 视觉数字概念向动作系统的渗透. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .矛盾的是,有意识的视觉感知的稳定方面并不受动作的影响。.................... ... 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 .19.18
人工智能 - 一种现代方法
A1 是研究从环境中接收感知并执行动作的代理。每个这样的代理都实现一个将感知序列映射到动作的功能,我们介绍了表示这些功能的不同方法,例如生产系统、反应代理、实时逻辑规划器、神经网络和决策理论系统。我们解释了学习的作用是将设计师的范围扩展到未知环境,并展示了该角色如何限制代理设计,有利于显性知识表示和推理。我们将机器人技术和视觉视为独立定义的问题,而不是为了实现目标而发生的。我们强调任务环境在确定适当的代理设计方面的重要性。我们的主要目的是传达多年来出现的想法

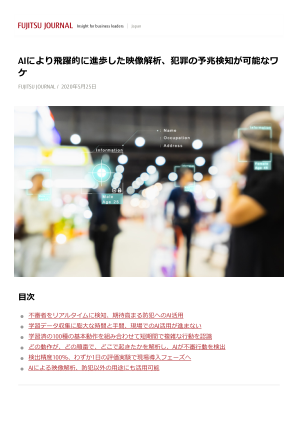
基于人工智能和传感器网络的有氧运动核心力量训练研究
传统的基于案例教学的训练系统是根据以往的比赛和训练案例分析来进行健美操专项动作的力量训练,训练结果无法智能精准评估,动态分析性能差。针对此问题,设计基于人工智能的健美操专项动作力量素质核心训练系统,实现健美操专项动作力量素质的智能化训练。通过对模糊范式系统的研究,实现了智能模糊网络的优化、决策等智能功能。设计系统架构框架包括传感器、接收器、数据库、分析决策等模块。系统核心芯片为Atmega1280单片机主控模块进行人机交互,实现健美操专项动作力量素质的全面训练。信息采集模块用于采集器械、动作、语言等力量训练信息。采用FIR滤波器处理信号传输过程中相位畸变问题。通过信息管理模块实现学员信息管理、训练成绩统计与查询。系统软件部分给出了系统软件结构图和系统启动登陆流程。通过分析模块工作过程,对健美操专项动作的力量进行分析。实验结果表明,所设计的系统能实现健美操专项动作的实时、稳定的力量训练,提高训练效率。

对重定向步行的敏感性考虑凝视,姿势和亮度
图1:我们发现我们发现在重定向步行(RDW)期间发现与场景运动相关的生理信号的特性的可视化和生理信号的特性。(a)我们进行了心理物理实验,其中参与者完成了数百个试验的旋转任务,在旋转过程中,将不同量的额外场景运动注入虚拟环境中。参与者报告了他们是否认为额外的注射动作,我们计算了他们对这些动作的视觉敏感性。(b)我们的分析表明,随着注射动作的速度提高,参与者的凝视(左)和姿势(右)的稳定性下降。这些结果首次表明了重定向强度(注入视觉运动增长)和生理信号之间的直接相关性。