XiaoMi-AI文件搜索系统
World File Search System动态



菲律宾经济动态
经济继续展现出强劲的韧性;中期有望实现快速、持续和包容性增长 • 2024 年第一季度 GDP 增长 5.7%,与越南相同,但好于中国(5.3%)、印度尼西亚(5.1%)和马来西亚(3.9%)。 • 由于采取了预防措施减轻厄尔尼诺现象的影响,农业增长了 0.4%。受商品需求增加推动,制造业带动工业增长 5.1%。受旅游相关服务复苏推动,服务业增长 6.9%。 • 净出口扭转局面,从 2023 年第一季度的 -11.8% 和 2023 年第四季度的 -14.9% 增长 9.5%,原因是电子产品出口复苏较快。与此同时,由于主要食品价格上涨和商业情绪不佳,家庭消费和投资增长放缓,国内需求有所放缓。政府消费也有所放缓。 • 政府继续实施战略行动,减轻厄尔尼诺现象的影响,增加国内生产以确保粮食安全,并建立机制赋予消费者权力以对抗通货膨胀。 • 政府致力于实现今年 6.0%-7.0% 的增长目标,2025 年实现 6.5%-7.5% 的增长目标,2026-2028 年实现 6.5%-8.0% 的增长目标,同时推动促进经济增长的战略,确保国家继续朝着中长期目标前进。 鉴于通胀前景的上行风险,菲律宾央行保持紧缩货币政策 • 4 月份通胀率从 3 月份的 3.7% 小幅上升至 3.8% 的同比水平,与菲律宾央行当月 3.5-4.3% 的通胀预测一致。这使得年初至今的平均通胀率为 3.4%,仍在政府 2-4% 的目标范围内。由于天气条件对农业生产的不利影响和积极的基数效应,预计未来三个月通胀率将暂时高于目标范围。• 展望未来,菲律宾央行认为维持紧缩货币政策设置是适当的。菲律宾央行还将继续支持国家政府的政策和计划,以应对主要食品商品价格的供应侧压力,并随时准备根据需要调整货币政策设置,以履行其维护价格稳定的主要职责。


毛里求斯经济动态
单位 FY23/24 FY24/25 FY25/26 FY26/27 当前市场价格的 GDP(十亿毛里求斯卢比) 704.0 798.5 880.3 970.6 实际 GDP 增长率 % 7.0 7.0 5.0 5.0 经常账户余额(占 GDP 的百分比) -4.1 -3.4 -3.3 -3.2 财政平衡(占 GDP 的百分比) -3.9 -3.4 -3.1 -2.7 政府借款需求(占 GDP 的百分比) 4.4 4.8 3.4 2.2 预算中央政府债务(占 GDP 的百分比) 65.4 63.0 60.4 57.9 经常性收入(占 GDP 的百分比) 24.6 25.9 25.6 25.0 经常性支出(占 GDP 的百分比) 26.2 26.3 25.5 24.5 经常性余额(占 GDP 的百分比) -1.6 -0.4 0.1 0.1 总支出(占 GDP 的百分比) 28.7 29.7 28.2 27.9 总收入(占 GDP 的百分比) 24.8 26.4 26.1 25.1 公共部门总债务(占 GDP 的百分比) 74.5 71.1 67.7 64.1 税收支出(占 GDP 的百分比) 3.71 3.73 - - 数据来源:毛里求斯财政、经济规划和发展部(MOFEPD)
动态_1711715017_4693 (1).xlsx
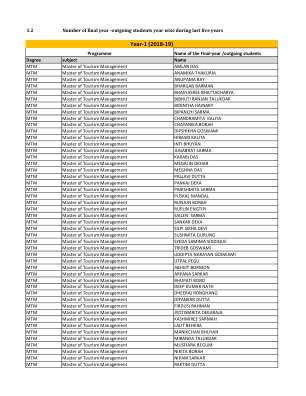
最后一年/毕业学生姓名 学位科目 名称 MTM 旅游管理硕士 AMLAN DAS MTM 旅游管理硕士 ANAMIKA THAKURIA MTM 旅游管理硕士 ANUPAMA RAY MTM 旅游管理硕士 BHARGAB BARMAN MTM 旅游管理硕士 BHASYASREE BHATTACHARYA MTM 旅游管理硕士 BIBHUTI RANJAN TALUKDAR MTM 旅游管理硕士 BIDINTHA HAINARY MTM 旅游管理硕士 BIPANCHI SARMA MTM 旅游管理硕士 CHANDRAMITA KALITA MTM 旅游管理硕士 CHAYANIKA BORAH MTM 旅游管理硕士 DIPSHIKHA GOSWAMI MTM 旅游管理硕士 HIRASRI KALITA MTM 旅游管理硕士 INTI BHUYAN MTM 旅游管理硕士 JUGABRAT SARMA MTM 旅游管理硕士 KARABI DAS MTM 旅游管理硕士 MEDALIN DKHAR MTM 旅游管理硕士 MEGHNA DAS MTM 旅游管理硕士 PALLAVI DUTTA MTM 旅游管理硕士 PANKAJ DEKA MTM 旅游管理硕士 PARISHMITA SARMA MTM 旅游管理硕士 PUSKAL MANDAL MTM 旅游管理硕士 RUNJUN BORAH MTM 旅游管理硕士 RUPLIN ENGTIPI MTM 旅游管理硕士 SAILEN SARMA MTM 旅游管理硕士 SANKAR DEKA MTM 旅游管理硕士 SILPI SIKHA DEVI MTM 旅游管理硕士 SUSHMITA GURUNG MTM 旅游管理硕士 SYEDA SAMIMA SIDDIQUE MTM 旅游管理硕士 TRIDEB GOSWAMI MTM 旅游管理硕士 UDDIPTA NARAYAN GOSWAMI MTM 旅游管理硕士 UTPAL PEGU MTM 旅游管理硕士 ABHIJIT BORMON MTM 旅游管理硕士 ARPANA SARKAR MTM 旅游管理硕士 BHUPATI BORO MTM 旅游管理硕士 DEEP KUMAR NATH MTM旅游管理硕士 DHEERAJ RONGHANG MTM 旅游管理硕士 DIPANKAR DUTTA MTM 旅游管理硕士 FIRDUSI RAHMAN MTM 旅游管理硕士 JYOTISMRITA DEKARAJA MTM 旅游管理硕士 KASHMIREE SARMAH MTM 旅游管理硕士 LALIT BEHERA MTM 旅游管理硕士 MANIKCHAN BHUYAN MTM 旅游管理硕士 MIRANDA TALUKDAR MTM 旅游管理硕士 MUSFIARA BEGUM MTM 旅游管理硕士 NIKITA BORAH MTM 旅游管理硕士 NIPAM SARKAR MTM 旅游管理硕士 RAKTIM DUTTA


动态进化方法...
多任务学习假设能够从多个任务中学习的模型可以通过知识迁移实现更好的质量和效率,这是人类学习的一个关键特征。然而,最先进的 ML 模型依赖于每个任务的高度定制,并利用大小和数据规模而不是扩展任务数量。此外,持续学习将时间方面添加到多任务中,通常专注于研究常见的陷阱,例如灾难性遗忘,而不是将其作为构建下一代人工智能的关键组成部分进行大规模研究。我们提出了一种能够生成支持动态添加新任务的大规模多任务模型的进化方法。生成的多任务模型是稀疏激活的,并集成了基于任务的路由,可保证在模型扩展时计算成本有限并且每个任务添加的参数更少。所提出的方法依赖于知识分区技术来实现对灾难性遗忘和其他常见陷阱(如梯度干扰和负迁移)的免疫。我们通过实验证明,所提出的方法可以联合解决 69 个公共图像分类任务并取得有竞争力的结果,例如,与在公共数据上训练的最佳模型相比,通过实现 15% 的相对误差减少,提高了 cifar10 等竞争基准的最新水平。

医学新动态
Iliev ID 、Brown GD、Bacher P、Gaffen SL、Heitman J、Klein BS、Lionakis MS。重点研究真菌。Cell。2024 年 9 月 19 日;187(19):5121-5127。doi: 10.1016/j.cell.2024.08.016。PMID: 39303681。Joseph AM、Ahmed A、Goc J、Horn V、Fiedler B、Garone D、Grigg JB、Uddin J、Teng F、Fritsch M、Vivier E、Sonnenberg GF。RIPK3 和 caspase-8 解读细胞因子信号以调节肠道中的 ILC3 存活。Mucosal Immunol。2024 年 8 月 11 日:S1933-0219(24)00085-0。 doi: 10.1016/j.mucimm.2024.08.004。电子版提前印刷。PMID:39137882。Bull LE、Webster EM、McDougale A、Howard D、Ahsan MD、Levi S、Grant B、Chandler I、Christos P、Sharaf RN、Frey MK。健康风险信息技术辅助基因评估协议 (HeRITAGE):在多元化医疗服务不足的妇科诊所进行数字基因癌症风险评估的随机对照试验。BMJ Open。2024 年 9 月 5 日;14(9):e082658。doi:10.1136/bmjopen-2023-082658。PMID:39237276;PMCID:PMC11381689。 Flanagan R、Levine C、Hung K、Hughes M、Fritz CDL、Wan D、Stein DJ。胃肠病学住院医师模式对胃肠病学研究员培训的教育影响。胃肠病学。2024 年 10 月 2 日:S0016-5085