XiaoMi-AI文件搜索系统
World File Search System动态图
国防部接口标准
5.3.1.1 边界八边形和框架。........................................................................... 9 5.3.1.2 边界八边形和图标/修饰符 ........................................................................ 11 5.3.2 框架 ........................................................................................................... 11 5.3.2.1 标准标识。.................................................................................................. 15 5.3.2.2 域 .................................................................................................................. 15 5.3.2.3 状态。.................................................................................................... 15 5.3.3 填充 ............................................................................................................. 16 5.3.4 图标 ............................................................................................................. 18 5.3.4.1 主图标。................................................................................................................ 18 5.3.4.2 全八边形图标。........................................................................................................ 18 5.3.4.3 全框架图标。.................................................................................................... 18 5.3.5 修饰符。............................................................................................................. 19 5.3.6 放大器 ............................................................................................................. 19 5.3.6.1 梯队指示器 ............................................................................................. 23 5.3.6.2 安装指示器。............................................................................................. 24 5.3.6.3 特遣队指示器。................................................................................................ 24 5.3.6.4 假动作/假指标 .............................................................................................. 24 5.3.6.5 偏移位置放大器 .............................................................................................. 24 5.3.6.6 高度/深度修正器。........................................................................... 27 5.3.6.11 文本修改器。................................................................................................ 25 5.3.6.6.1 高度基准点 .............................................................................................. 25 5.3.6.6.2 相对高度 .............................................................................................................. 25 5.3.6.6.3 飞行高度层 .............................................................................................................. 25 5.3.6.6.4 高度/深度修正器的多个实例 ............................................................................. 25 5.3.6.7 日期时间组。.................................................................................................... 26 5.3.6.8 运动方向放大器 ............................................................................................. 26 5.3.6.9 移动指示器 ............................................................................................. 26 5.3.6.10 辅助设备指示器。.................................................................................................... 28 5.3.6.12 动态图形放大器 .......................................................................................... 28 5.3.6.12.1 不确定面积放大器。...................................................................................... 30 5.3.6.12.1.1 椭圆AOU放大器 ...................................................................................... 30 5.3.6.12.1.2 轴承箱AOU放大器 ................................................................................ 30 5.3.6.12.1.3 轴承线AOU放大器。.................................................................... 30 5.3.6.12.2 航位推算拖车放大器 .............................................................................. 30 5.3.6.12.2.1 线路 DR 拖车放大器 .............................................................................. 30 5.3.6.12.2.2 最远圆 DR 拖车放大器 ...................................................................... 30 5.3.6.12.3 速度领先放大器 ...................................................................................... 30 5.3.6.12.4 配对线路放大器 ...................................................................................... 31

生成性动力图形 - 代表性学习 -
在金融交易中进行检测至关重要,特别是对于确定诸如阴谋欺骗之类的复杂行为。传统机器学习方法主要集中在孤立的节点特征上,通常忽略了互互互操作节点的更广泛背景。基于图形的技术,尤其是图形神经网络(GNN),通过有效利用关系信息来推进该领域。但是,在现实世界中的欺骗检测数据集中,交易行为表现出动态,不规则的模式。措施欺骗检测方法虽然在某些方面有效,但仍在努力捕获动态和多样化的,不断发展的节点之间的关系的复杂性。为了应对这些挑战,我们提出了一个名为“生成动态图”模型(GDGM)的新颖框架,该框架对动态交易行为进行建模以及节点之间的关系,以学习阴谋欺骗检测的表示表示。具体来说,我们的方法结合了生成动态的潜在空间,以捕获时间模式和不断发展的市场条件。原始交易数据首先将其转换为时标的序列。然后,我们使用神经普通微分方程和门控反式单元对交易行为进行建模,以生成结合欺骗模式的时间动态的表示形式。此外,还采用了伪标记的结构和异质聚合技术来收集相关信息并提高阴谋欺骗行为的检测性能。对欺骗检测数据集进行的实验表明,我们的方法在检测准确性方面构成了最先进的模型。此外,我们的欺骗检测系统已成功部署在最大的全球交易市场之一中,进一步验证了所提出方法的实际适用性和性能。
![arxiv:2008.12638v1 [Quant-ph] 2020年8月28日](/simg/9\92ac652fff7b0a7aef8ae2ef0bfabbc114c9dd15.webp)
arxiv:2008.12638v1 [Quant-ph] 2020年8月28日
介绍。-如今,由于Quanth信息理论的理论和实验分支的不断发展,量子记忆的主题越来越相关。特别是马尔可夫进化的概念(没有记忆的进化),形成了量子开放系统的理论[1,2],最近在不同的框架内以广泛的方式研究了[3-5]。虽然针对经典案例进行了良好的规定,但在量子环境中仍缺乏单一的定义。用于描述无内存过程的两种典型方法与动力学[6]的分裂性或Information的后流有关[7]。与马尔可夫有关的主要兴趣来自对其定义的否定 - 被描述为非马克维亚的过程应表达量子记忆效应。量子非标志性可以被视为各种量子信息任务(例如量子计算,通信或密码学)的资源。尽管有这种理念,但在量子环境中的当前方法通常并不关心自己在真正的量子的记忆效率之间的适当区分。本文背后的主要思想是挑战这种现状,并显示出不同的方向以进行进一步研究。本注释的目的是提出一种新的方法,以描述量子信息黑色流量。在部分基本动力学图中,我们介绍了基本动力学图的定义,而在级别的量子记忆中,我们使用此概念提出了没有quantummosem的动态图的广义概念(即没有量子信息返回 -在马克维亚语的部分中,我们将回忆起CP-划分性和缺乏信息背流的概念,当在经典类型的后流中,我们将经典动态的实现为量子动力学图,并引入了指示当前量子记忆概念的概念问题的示例。
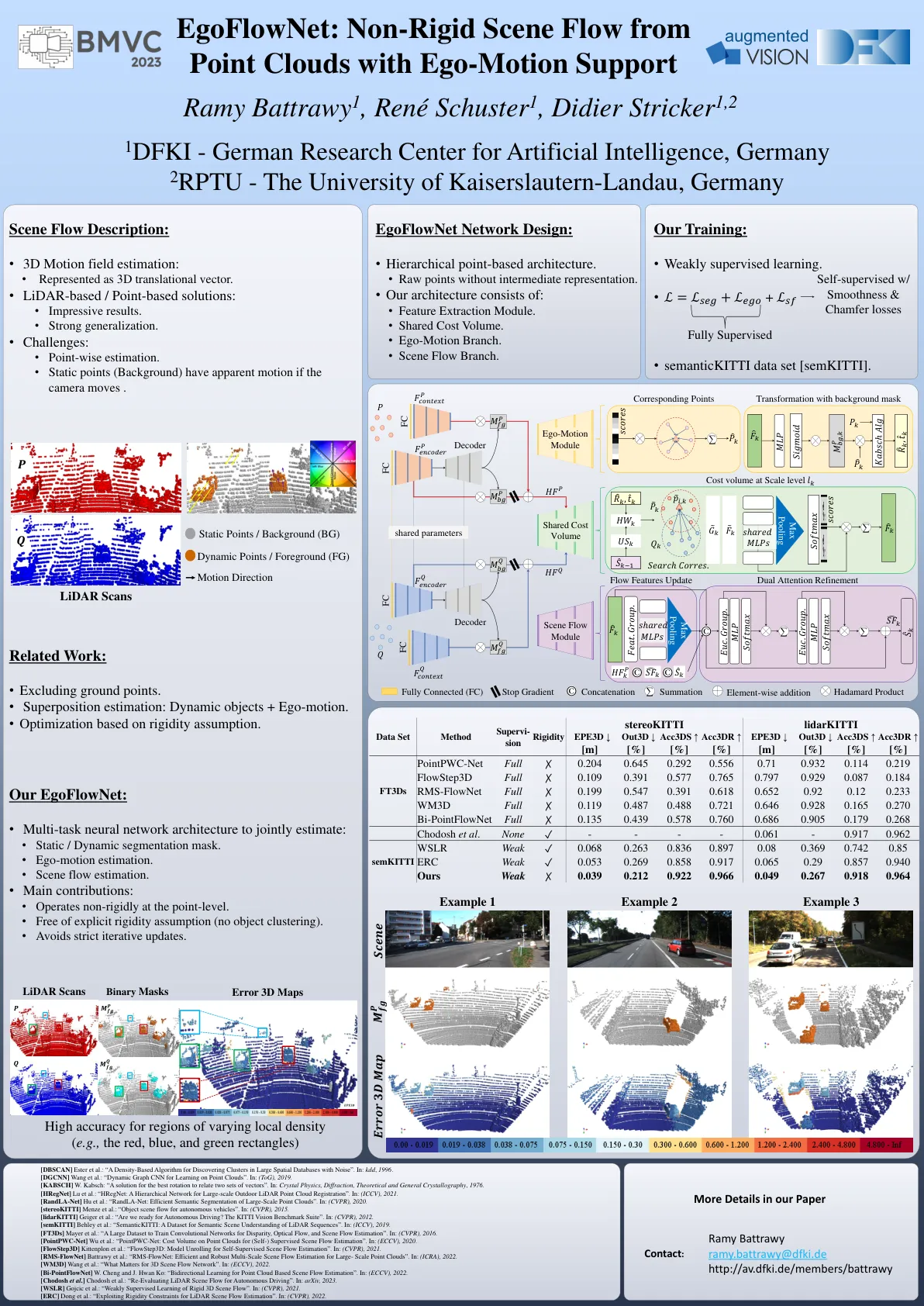
非刚性场景从点云流动,并带有自我感动...
[dbscan] Ester等。:“一种基于密度的算法,用于在具有噪声的大空间数据库中发现簇”。:KDD,1996年。[DGCNN] Wang等。:“用于在点云上学习的动态图CNN”。in :( tog),2019年。[Kabsch] W. Kabsch:“解决两组向量的最佳旋转解决方案”。in:晶体物理学,衍射,理论和一般晶体学,1976年。[Hregnet] Lu等。:“ Hregnet:用于大规模室外激光点云注册的分层网络”。in:(iccv),2021。[Randla-net] Hu等。:“ randla-net:大规模点云的有效语义分割”。in:(cvpr),2020。[Stereokitti] Menze等。:“自动驾驶汽车的对象场景流”。in:(cvpr),2015年。[Lidarkitti] Geiger等。:“我们准备好进行自动驾驶了吗?Kitti Vision基准套件”。in:(cvpr),2012年。[Semkitti] Behley等。:“ Semantickitti:用于LIDAR序列的语义场景的数据集”。in:(ICCV),2019年。[FT3DS] Mayer等。:“一个大型数据集来训练卷积网络以差异,光流和场景流量估计”。in:(cvpr),2016年。[pointpwc-net] Wu等。:“ PointPWC-NET:(自我监督场景流估计)点云上的成本量”。在:(ECCV),2020年。[FlowStep3d] Kittenplon等。:“ FlowStep3d:自我监督场景流估计的模型展开”。in:(cvpr),2021。[RMS-FLOWNET] Battrawy等。:“ RMS-FLOWNET:大规模点云的高效且稳健的多尺度场景流程估计”。in:(icra),2022。[WM3D] Wang等。:“对于3D场景流网络重要的东西”。in:(ECCV),2022。[Bi-Pointflownet] W. Cheng和J. Hwan Ko:“基于点云的场景流估计的双向学习”。in:(ECCV),2022。[Chodosh等人]Chodosh等。:“重新评估激光雷达场景以进行自动驾驶”。in:arxiv,2023。[WSLR] Gojcic等人。:“严格3D场景流的弱监督学习”。in:(cvpr),2021。[ERC] Dong等。 :“利用震子场景流量估计的刚性约束”。 in:(cvpr),2022。[ERC] Dong等。:“利用震子场景流量估计的刚性约束”。in:(cvpr),2022。

复杂评估的科学和方法基础...
阿塞拜疆国家科学院 Alovsat Garaja Aliyev 信息技术研究所。AZ1141,阿塞拜疆,巴库 电子邮件:alovsat_qaraca@mail.ru;alovsat.qaraca@gmail.com Roza Ordukhan Shahverdiyeva 阿塞拜疆国家科学院信息技术研究所。AZ1141,阿塞拜疆,巴库 电子邮件:shahverdiyevar@gmail.com 收到日期:2022 年 1 月 10 日;接受日期:2022 年 3 月 9 日;发表日期:2022 年 4 月 8 日 摘要:本文探讨了全面评估数字经济信息系统威胁和损害的科学和方法基础。定义了数字经济的信息基础设施和任务。研究了数字经济领域信息安全的来源及其信息安全要求。以示意图形式显示了全球网络安全指数对世界各国情况的分析结果。显示了 ICT 领域网络安全支出的动态图。有人认为,通过使用数字系统形成和发展的网络安全是优先事项。在 4.0 工业革命的平台上给出了网络攻击的许多目标和方法。研究了数字经济中信息安全违规的案例及其造成的损害评估过程。提出了评估数字经济中信息损害的通用标准。给出了对信息和通信系统的威胁以及损害的分类。提出了阿塞拜疆数字经济领域信息系统和资源面临的威胁和损害概念模型的结构方案。使用模糊方法对信息威胁传播方式进行了专家描述。给出了信息系统安全威胁造成的主要损害类型。展示了数字经济中信息丰富和过剩的安全方面。给出了提高数字经济安全和信任水平的方向以及确保其安全的结构。确定了数字经济中信息安全的主要方向,确定了确保其安全和增加其信任的方向。提出了数字经济领域常用的通用基础技术。已经探索了一些数字经济中综合风险和损害评估的方法。已经提出了一种基于模糊方法的科学方法论,用于实施数字经济中复杂的风险和损害评估。

通过无人机航拍确定积雪深度分布...
确定积雪深度的空间分布不仅对于与饮用水供应或水力发电相关的民用目的至关重要,而且对于雪、水文和环境研究中的多种应用也至关重要。然而,积雪深度在空间和时间上都变化很大。因此,传统和最先进的积雪监测方法并不总是能够捕捉到如此高的空间变化,除非采用非常昂贵的解决方案。在这项研究中,我们提出了一种新方法,旨在通过利用地球科学研究环境中的两种低成本和新兴技术来提出解决问题的方法;运动结构 (SfM) 数字摄影测量和无人机 (UAV)。这些技术相结合的优点在于,它们可以以较低的运行成本和较少的工作量提供大面积的精确高分辨率数字高程模型 (DEM)。所提出的方法将利用这一资产,在地理参考雪面(雪 DEM)与其相应的底层地形(地形 DEM)之间进行减法,从而提供雪深分布图。为了在小规模上测试所提出方法的可行性和效率,在上述背景下调查了六个不同的积雪区域。这些区域的面积从 900 到 51,000 平方米不等,其中两个位于斯瓦尔巴群岛朗伊尔城附近,四个位于西格陵兰岛安登峡湾附近。调查在雪面类型、底层地形复杂性、亮度条件和所用设备方面有所不同,以评估该方法的适用范围。结果呈现为六张雪深分布图,并通过比较估计的雪深和一组质量控制点上探测到的雪深来验证。根据区域不同,探测到的雪深与估计的雪深之间的平均差异从最佳情况的 0.01 米到最坏情况的 0.19 米不等,同时空间分辨率范围从 0.06 到 0.1 米。彻底调查了每种情况的误差源,并评估了通过使用雪面和相应的底层地形中可见的公共地面控制点对 DEM 进行地理配准可以进一步减轻误差。在进行的测试中,该方法没有受到该区域的任何特定表面特征或任何调查条件的特别限制。尽管是在小规模区域进行测试,但通过考虑这些初步结果,该方法有可能成为一种简化程序,允许重复绘制雪动态图,同时降低运行成本,并且不会放弃获得高精度和高分辨率。