XiaoMi-AI文件搜索系统
World File Search System动态模式
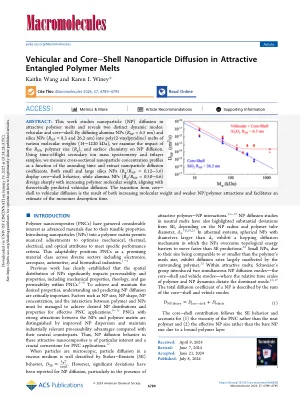
在有吸引力的纠缠聚合物熔体
摘要:这项工作研究了有吸引力的聚合物融化中的纳米颗粒(NP)扩散,并揭示了两种不同的动态模式:车辆和核心 - 壳。通过扩散氧化铝NP(R np = 6.5 nm)和二氧化硅NP(R NP = 8.3和26.2 nm)中的各种分子量(14-1220 kDa)的聚(2-乙烯基吡啶)融化,我们检查了R np,Polymer size(R g)和表面化学的影响。使用飞行时间二级离子质谱和三层样品,我们测量横截面纳米颗粒浓度曲线作为退火时间的函数,并提取纳米颗粒扩散系数。小二氧化硅NP(r g / r np = 0.12 - 3.6)显示核心 - 壳行为,而氧化铝NP(r g / r np = 0.50 - 4.6)急剧差异,聚合物分子量的增加,与理论上预测的车辆扩散保持一致。从核心 - 壳到车辆扩散的过渡是分子量增加和较弱的NP/聚合物吸引力的结果,并促进了单体解吸时间的估计值。■简介

Koopman EDMD候选功能的分析构建,以最佳控制Ackermann Steecer evelicles
摘要:自动驾驶汽车(AV)的路径跟踪控制性能至关重要地取决于建模选择和随后的系统识别更新。传统上,汽车工程已经建立在增加白色和灰色框模型以及系统识别的忠诚度之后。尽管这些模型具有解释性,但它们会遭受建模不准确,非线性和参数变化的困扰。在另一端,端到端的黑框方法(例如行为克隆和增强学习)提供了提高的适应性,但以解释性,可推广性和SIM2REAL间隙为代价。在这方面,诸如Koopman扩展动态模式分解(KEDMD)之类的混合数据驱动技术可以通过选择“提升功能”来实现非线性动力学的线性嵌入。但是,该方法的成功主要基于提升函数和优化参数的选择。在这项研究中,我们提出了一种分析方法,使用迭代的谎言支架向量字段来构建这些提升功能,考虑了我们Ackermann Steceer的自主移动机器人的配置歧管上的载体和非独立限制。使用标准车辆动力学操纵的轨迹跟踪以及沿闭环赛车轨道进行了轨迹跟踪,显示了所获得的线性KEDMD模型的预测和控制功能。

动态系统的数据驱动线性化
抽象动态模式分解(DMD)及其变体(例如扩展DMD(EDMD))广泛用于将简单的线性模型粘贴到可观察到的可观察数据中已知的动态系统中。在多种情况下dmd meth-ods效果很好,但在其他情况下表现较差,因此需要对DMD的假设进行澄清。在更仔细的检查过程中,基于Koopman操作员的DMD方法的现有解释并不令人满意:它们在假设下仅对通用可观察物的概率为零证明DMD是合理的。在这里,我们为DMD作为局部的,前阶还原模型的拟合方式,用于在具有概率的条件下,对于通用可观察到的概率和非分类观察数据。我们通过在吸引缓慢的频谱子歧管(SSM)中构造其主导动力的线性化转换来实现这一目标,并用于有限的或有限维度的周期强制系统。我们的参数还导致了一种新的算法,数据驱动的线性化(DDL),它是慢速SSM中可观察动力学的高阶,系统的线性化。我们通过示例显示

传感器 - 语义学者
摘要:小型飞机类别(例如小型空中运输(SAT)、城市空中交通(UAM)、无人机系统(UAS))、现代航空电子解决方案(例如电传操纵(FBW))和减小的飞机(A/C)尺寸的异质性需要更紧凑、集成、数字化和模块化的空气数据系统(ADS),能够测量来自外部环境的数据。在 Clean Sky 2 计划的框架内资助的 MIDAS 项目旨在通过经过商业应用认证的 ADS 满足这些最新要求。主要支柱在于 COTS 解决方案和分析传感器(专利技术)之间的智能融合,以识别空气动力学角度。识别涉及飞行动态关系和基于神经技术的数据驱动状态观察器,一旦训练完成,它们就是确定性的。由于该项目将首次将分析传感器作为冗余系统的一部分安装在民用飞机上,因此本工作中记录的设计活动特别关注适航认证方面。在此成熟度级别,使用模拟数据,下一阶段将使用真实飞行测试数据。描述了训练和测试方面的数据收集。训练操作旨在激发所有动态模式,而测试操作旨在独立于训练集和所有自动驾驶仪配置验证结果。结果表明,替代解决方案
通信和配置指南
支持WS500 Pro添加的CAN可以向CST报告TX/RX错误计数; (可用于调试不可靠的CAN子系统)将系统瓦的容量提高到40kW。($ sca:命令)在Victron Cerbo上显示的随机交流发电机值的错误纠正的错误,当时本地电流传感线(灰色/紫色)未连接到任何东西。修正了错误的错误,在切换空白并重新配置调节器后,保留了旧的白色空间细节,而不是清除。($ msr:@是有效的)在储备电源模式下,改善了对重新充电电池充电的支持。增加了对Victron Lynx BMS(基于电池实例)(参考附录A)的汇总的支持。(请勿将其与Victron电池一起使用,只有通过此11位协议“广告” Victron“广告”支持的非Victron电池)参考:$ CCN:命令。在DCDC转换器处于发动机开关动态模式时,改进了12V电池的处理。在DCDC转换器中为12V电池添加了“ 12V刷新充电”选项。(REF $ CDD和$ DCC)将BMS聚合的WASPEEDS功能扩展到Victron Lynx BMS。WS500 Pro功能:
传感器 - 语义学者
摘要:小型飞机类别(例如小型空中运输(SAT)、城市空中交通(UAM)、无人机系统(UAS))、现代航空电子解决方案(例如电传操纵(FBW))和减小的飞机(A/C)尺寸的异质性需要更紧凑、集成、数字化和模块化的空中数据系统(ADS),该系统能够测量来自外部环境的数据。在 Clean Sky 2 计划的框架内资助的 MIDAS 项目旨在通过经过商业应用认证的 ADS 满足这些最新要求。主要支柱在于 COTS 解决方案和分析传感器(专利技术)之间的智能融合,以识别气动角度。识别涉及飞行动态关系和基于神经技术的数据驱动状态观察器,一旦训练完成,它们就是确定性的。由于该项目将首次将分析传感器作为冗余系统的一部分安装在民用飞机上,因此本工作中记录的设计活动特别关注适航认证方面。在此成熟度级别,使用模拟数据,下一阶段将使用真实飞行测试数据。描述了训练和测试方面的数据收集。训练操作旨在激发所有动态模式,而测试操作旨在独立于训练集和所有自动驾驶仪配置验证结果。结果表明,替代解决方案是可能的,可以大大节省计算工作量和代码行数,但同时也表明,更好的训练策略可能有利于应对新的神经网络架构。

早期肠道菌群和早产儿的神经发育:叙事评论
出生的早产儿的肠道菌群(GM)失调和神经发育障碍的高风险。虽然早期营养不良与短期临床结局之间的联系已建立,但与长期婴儿健康的关系直到最近才引起人们的兴趣。值得注意的是,GM的发育窗口和早期神经系统的发展窗户存在显着重叠。首先在动物模型中描述了GM和神经发育之间的联系,但是在过去的十年中,越来越多的研究也将GM特征确定为人类神经发育和神经精神疾病的潜在介体之一。在这篇叙事评论中,我们概述了早期生活中发展的通用汽车及其与神经发育的前瞻性关系,重点是早产儿。动物模型为将早期GM与大脑发育联系起来的新兴途径提供了证据。此外,记录了早产儿早期生活和大脑成熟期间GM的动态模式与静态特征之间的关系,以及童年早期的神经发育结果。与动物模型的研究融合在一起的大型人群的未来人类研究可能提供更多证据,并有助于鉴定早产儿的健康神经发育的预测性生物标志物和潜在的治疗靶标。
传感器 - 语义学者
摘要:小型飞机类别(例如小型空中运输(SAT)、城市空中交通(UAM)、无人机系统(UAS))、现代航空电子解决方案(例如电传操纵(FBW))和减小的飞机(A/C)尺寸的异质性需要更紧凑、集成、数字化和模块化的空中数据系统(ADS),该系统能够测量来自外部环境的数据。在 Clean Sky 2 计划的框架内资助的 MIDAS 项目旨在通过经过商业应用认证的 ADS 满足这些最新要求。主要支柱在于 COTS 解决方案和分析传感器(专利技术)之间的智能融合,以识别气动角度。识别涉及飞行动态关系和基于神经技术的数据驱动状态观察器,一旦训练完成,它们就是确定性的。由于该项目将首次将分析传感器作为冗余系统的一部分安装在民用飞机上,因此本工作中记录的设计活动特别关注适航认证方面。在此成熟度级别,使用模拟数据,下一阶段将使用真实飞行测试数据。描述了训练和测试方面的数据收集。训练操作旨在激发所有动态模式,而测试操作旨在独立于训练集和所有自动驾驶仪配置验证结果。结果表明,替代解决方案是可能的,可以大大节省计算工作量和代码行数,但同时也表明,更好的训练策略可能有利于应对新的神经网络架构。
传感器 - 语义学者
摘要:小型飞机类别(例如小型空中运输(SAT)、城市空中交通(UAM)、无人机系统(UAS))、现代航空电子解决方案(例如电传操纵(FBW))和减小的飞机(A/C)尺寸的异质性需要更紧凑、集成、数字化和模块化的空中数据系统(ADS),该系统能够测量来自外部环境的数据。在 Clean Sky 2 计划的框架内资助的 MIDAS 项目旨在通过经过商业应用认证的 ADS 满足这些最新要求。主要支柱在于 COTS 解决方案和分析传感器(专利技术)之间的智能融合,以识别气动角度。识别涉及飞行动态关系和基于神经技术的数据驱动状态观察器,一旦训练完成,它们就是确定性的。由于该项目将首次将分析传感器作为冗余系统的一部分安装在民用飞机上,因此本工作中记录的设计活动特别关注适航认证方面。在此成熟度级别,使用模拟数据,下一阶段将使用真实飞行测试数据。描述了训练和测试方面的数据收集。训练操作旨在激发所有动态模式,而测试操作旨在独立于训练集和所有自动驾驶仪配置验证结果。结果表明,替代解决方案是可能的,可以大大节省计算工作量和代码行数,但同时也表明,更好的训练策略可能有利于应对新的神经网络架构。
传感器 - 语义学者
摘要:小型飞机类别(例如小型空中运输(SAT)、城市空中交通(UAM)、无人机系统(UAS))、现代航空电子解决方案(例如电传操纵(FBW))和减小的飞机(A/C)尺寸的异质性需要更紧凑、集成、数字化和模块化的空中数据系统(ADS),该系统能够测量来自外部环境的数据。在 Clean Sky 2 计划的框架内资助的 MIDAS 项目旨在通过经过商业应用认证的 ADS 满足这些最新要求。主要支柱在于 COTS 解决方案和分析传感器(专利技术)之间的智能融合,以识别气动角度。识别涉及飞行动态关系和基于神经技术的数据驱动状态观察器,一旦训练完成,它们就是确定性的。由于该项目将首次将分析传感器作为冗余系统的一部分安装在民用飞机上,因此本工作中记录的设计活动特别关注适航认证方面。在此成熟度级别,使用模拟数据,下一阶段将使用真实飞行测试数据。描述了训练和测试方面的数据收集。训练操作旨在激发所有动态模式,而测试操作旨在独立于训练集和所有自动驾驶仪配置验证结果。结果表明,替代解决方案是可能的,可以大大节省计算工作量和代码行数,但同时也表明,更好的训练策略可能有利于应对新的神经网络架构。