XiaoMi-AI文件搜索系统
World File Search System动臂

SenseWear™ 臂带的准确性和可靠性...
摘要——消费者和研究人员缺乏一种易于使用、可靠且经济高效的方法来准确评估身体活动和能量消耗,这是成功控制体重的关键因素。BodyMedia 通过开发 SenseWear 臂带满足了这一需求,该臂带利用 2 轴加速度计、热通量传感器、皮肤电反应传感器、皮肤温度传感器和近体环境温度传感器来收集数据,从而计算能量消耗。本文概述了相关研究,这些研究展示了 SenseWear 臂带如何提供非常低的能量消耗错误率,相对于更昂贵、限制更多且难以使用的设备,以及它如何是一种经济高效且简单的解决方案,可在实验室外应用以跟踪和探索能量消耗。索引术语——SenseWear 臂带、能量平衡、传感器阵列、能量消耗、TEE、AEE、REE、消耗评估身体活动评估、情境检测、自由生活环境、准确性和可靠性、可穿戴计算机。简介 增加身体活动量以及实现和维持能量平衡已成为 21 世纪重要的个人健康目标。卫生专业人员深知,许多主要的健康问题都是由缺乏身体活动以及摄入的热量多于消耗的热量而引起或加剧的。肥胖症流行及其相关问题,包括高血压、II 型糖尿病、冠状动脉疾病、关节炎和慢性背痛,都证明了久坐的生活方式和超重会导致生活质量低下,在许多情况下还会导致过早死亡。虽然卫生专业人员以及有体重问题的个人都承认需要改善和维持他们的锻炼和饮食行为,但他们缺乏准确测量能量消耗所需的工具,而能量消耗是确定一个人消耗的能量是否多于摄入能量的重要身体测量指标。为了减肥,一个人首先必须能够准确量化活动量和能量消耗。只有这样,他们才能开始对日常生活进行必要的适当改变,以帮助他们提高活动量和调整卡路里摄入量。到目前为止,还没有一种易于使用、可靠且准确的方法可以在实验室环境之外定期评估身体活动量和能量消耗。这对体重有重大影响
2018技术演示行业日-SOMA -NASA
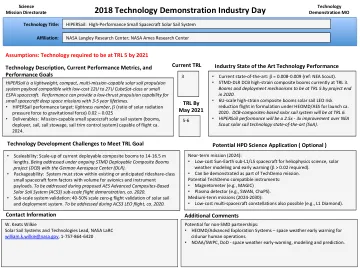
•缩放性:将电流可部署的复合动臂扩大到14-16.5 m的长度。与德国航空航天中心(DLR)正在进行的STMD可部署复合动臂项目(DCB)有关。•包装:系统必须存放在现有或预期的乘车式小型航天器形式中,并具有航空设备和仪器有效载荷的体积。将在拟议的AES高级复合材料太阳帆系统(ACS3)子尺度飞行示范中解决。2020。•子尺度系统验证:40-50%比例零G的太阳帆和部署系统验证。将在加利福尼亚州ACS3 Leo Flight期间解决。2020。

可自主可部署的塔楼基础设施,用于探索和通信的探索和通信
NASA有兴趣在Artemis Crewed Landings之前,在ArtemiS船员之前探索和机器人探索月球永久遮蔽区域(PSR)。这些地区的挑战地形意味着登陆器只能访问PSR的边缘,限制视线通信并感知PSR。自主部署的月球塔基础设施可以在这些PSR周围和周围提供有价值的视线。已开发出可部署的复合动臂用于微重力,我们通过在月球重力场垂直部署复合动臂来扩展这些功能。由高架平台在繁荣的顶部托管的服务,例如电力梁,无线电中继器或成像器,可以支持多个分布式,移动,机器人资产以及勘探人员的长期区域运营的近期运营。

CUTANA™ 止动缓冲液
CUT&RUN 方法 CUT&RUN 使用 CUTANA™ChIC/CUT&RUN 试剂盒进行,起始于 500k K562 细胞,含 0.5 µg IgG(EpiCypher 13-0042)、H3K4me3(EpiCypher 13-0060)、H3K27me3(EpiCypher 13-0055)或 0.125 µg CTCF(EpiCypher 13-2014)抗体,一式两份。使用 CUTANA™CUT&RUN 文库制备试剂盒(EpiCypher 14-1001/14-1002)以 5 ng DNA(或回收总量,如果少于 5 ng)进行文库制备。文库在 Illumina NextSeq2000 上运行,采用双端测序(2x50 bp)。样本测序深度为 5.5/18.8 百万个读数 (IgG Rep 1/Rep 2)、14.2/17.0 百万个读数 (H3K4me3 Rep 1/Rep 2)、24.7/18.1 百万个读数 (H3K27me3 Rep 1/Rep 2) 和 8.6/5.5 百万个读数 (CTCF Rep 1/Rep 2)。使用 Bowtie2 将数据与 T2T-CHM13v2.0 基因组比对。过滤数据以删除重复、多比对读数和 ENCODE DAC 排除列表区域。

带电动汽车的消防安全
WP06 Effective Manual Operations Cur Fut Reg.i TRL Validation 6-A Manual screening of cargo fire hazards and effective fire patrols C F R 6-7 Onboard/Terminal 6-B Quick manual fire confirmation and localization C F 6-7 Onboard 6-C Efficient first response C 6 Onboard 6-D Effective and efficient manual firefighting C F 6 Onboard/Field WP07 Inherently Safe Design Cur Fut Reg.i TRL Validation 7-A Improved fire detection system interface design C R 5-6 Onboard/Virtual 7-B Efficient extinguishing system activation and inherently safe design C R 6 Onboard 7-C Firefighting resource management centre C F 6 Onboard/Virtual WP08 Ignition Prevention Cur Fut Reg.i TRL Validation 8-A Automatic screening and management of cargo fire hazards C F 5 Onboard/Shore 8-B Guidelines and solutions for safe electrical connections C F R 6-7新型RO-RO空间材料的板载8-C火灾要求C F R 6-7实验室WP09检测cur fut fut fut。 10-B Weather deck fixed fire-extinguishing systems C R 6 Onboard 10-C Updated performance of alternative fixed fire-fighting systems C R 6 Lab WP11 Containment Cur Fut Reg.i TRL Validation 11-A Division of ro-ro spaces C 5 Lab/Onboard 11-B Ensuring safe evacuation C R 6 Virtual/Shipyard 11-C Safe design with ro-ro space openings C R 6 Virtual/Lab 11-D Ro-ro space ventilation and smoke extraction C R 5-6实验室/板上


脑机接口中的多臂老虎机
多臂老虎机 (MAB) 问题模拟了一个决策者,该决策者根据当前和获得的新知识优化其行动以最大化其回报。这种类型的在线决策在脑机接口 (BCI) 的许多程序中都很突出,MAB 以前曾用于研究,例如,使用哪些心理命令来优化 BCI 性能。然而,BCI 背景下的 MAB 优化仍然相对未被探索,即使它有可能在校准和实时实施期间提高 BCI 性能。因此,本综述旨在向 BCI 社区进一步介绍 MAB 的成果丰硕的领域。本综述包括 MAB 问题和标准解决方法的背景,以及与 BCI 系统相关的解释。此外,它还包括 BCI 中 MAB 的最新概念和对未来研究的建议。

无线手部运动控制机器人夹持臂
在各种自动化行业中,无线活动是必需的,特别是在危险或危险区域的偏远地区。在许多行业中,需要处理一些非常热的工作,而人手无法做到,在这种情况下,无线操作效率更高。该项目专注于使用微控制器在 X-bee 和无线传感器网络的帮助下设计手势控制的机械臂。它由两部分组成,通过无线传感器通信系统相互连接。X-bee 将充当发射器和接收器设备系统。主要部分由装有锂离子电池、微控制器和柔性传感器的手套组成。第二部分由电机、微控制器和机器人手指组成,机械动作通过它们发生。

用EEG信号自动操纵机器人臂
摘要 - 该项目具有客观地识别使用传感器“情感EEG Neuroset”的一些面部表情。此设备是一种能够通过脑电图技术(EEG)接收和解释大脑生物电活动的传感器,此外,还具有16个通道,并连续准确接受脑电波。此外,传感器具有易于使用的SDK,即使没有任何大脑信号获取经验,任何人即使没有任何经验。Emotiv®数据被转移到MATLAB®进行过滤脑电波,以通过串行通信向Arduino发送信息。因此,在Arduino板上获得了三种不同表达式的识别,即眨眼,眨眼和微笑,每个表达式在Arduino板上都有不同的LED颜色。