XiaoMi-AI文件搜索系统
World File Search System动臂

遗传性共济失调的定量眼动评估
摘要结核病(TB)和人类免疫症病毒(HIV)是菲律宾的两个主要公共卫生紧急情况。尽管全国性的努力和减轻该疾病的倡议,该国在结核病发生案例中排名第四。同时,菲律宾的艾滋病毒在亚洲和太平洋地区的流行最快。TB-HIV双重流行病形成了致命的组合,从而增强了彼此的进步,推动了免疫反应的恶化。为了理解共同感染的和epidemiologicalpatternsoftection,开发了TB-HIV的分室模型。一类患有艾滋病毒(PLHIV)的人不知道自己的艾滋病毒状况已纳入模型。这些不寻求医疗的不知道的PLHIV是新的HIV感染的潜在来源,可能会显着影响疾病传播动力学。灵敏度分析,以评估对兴趣输出影响的模型参数。使用TB,HIV和TB-HIV上的可用菲律宾数据对模型进行校准。参数的参数包括结核病和艾滋病毒的传播速率,从暴露到活动性结核病的进展速率,以及从艾滋病毒的TB lantent到艾滋病阶段的艾滋病毒的主动感染性结核。进行不确定性分析以确定估计值的准确性。
克兰菲尔德大学 新型摆臂机构...
摘要 � iii 致谢 � iv 目录 � 图表 � vi 表格表 � vii 1 � 介绍 � 1 1.1 � 概述 � 1 1.2 研究背景 � 2 1.3 研究目标 � 5 1.4 研究方法 � 6 2 � 文献综述 � 8 2.1 � 增升装置基础知识 � 8 2.2 常规后缘增升装置 � 10 2.3 后缘增升装置的机构类型 � 16 2.4 摆臂机构在增升装置中的应用 � 21 3 机构设计 � 26 3.1 机翼平面形状参数 � 26 3.2 襟翼翼型设计 � 26 3.3 摆臂襟翼机构原理 � 27 3.4 部件初始尺寸 � 32 3.5 改进程序和最终设计 � 36 3.6 襟翼载荷计算 � 44 3.7 机械应力分析 � 46 3.8 作动系统布置 � 47 3.9 讨论 � 51 3.10 � 机构设计总结 � 54 4 质量比较 � 55 4.1 传统襟翼机构的质量估算 � 55 4.2 摆臂机构的质量 � 56 4.3 比较结果 � 57 5 � 结论和未来工作 � 59 5.1 � 结论 � 59 5.2 未来工作 � 60 6 参考文献 � 62 7 参考书目 � 64 附录 A � 65 附录 B � 91 附录 C � 109 附录 K � 119

论量子引力中的真空涨落和干涉仪臂的涨落
我们计算了 K 及其涨落 ⟨ K 2 ⟩ 的期望值;两者都遵循与黑洞力学的贝肯斯坦-霍金面积定律相同的面积定律: ⟨ K ⟩ = ⟨ K 2 ⟩ = A 4 GN ,其中 A 是(极值)纠缠表面的面积。研究还表明,K 在 AdS 中受引力影响,因此会产生度量涨落。这些理论结果很有趣,但尚不清楚如何将这种关于全息量子引力的想法精确扩展到普通平坦空间。我们采取的方法是考虑度量涨落的实验特征是否可以决定平坦空间中量子引力真空的性质。特别是,我们提出了一个由 AdS/CFT 计算激发的理论模型,该模型重现了模哈密顿涨落的最重要特征;该模型由高占据数玻色子自由度组成。我们表明,如果该理论通过普通的引力耦合与干涉仪中的镜子耦合,且其应变灵敏度与引力波的灵敏度相似,则可以观察到真空涨落。

中国国内肿瘤药物批准的单臂试验
迫切需要有效的癌症治疗方法,特别是对于标准疗法不足的晚期和复发病例,刺激了创新治疗药物的开发1,2。在加快药物开发的策略中,使用单臂试验(SAT)正在成为一种有前途的途径,具有缩短药物批准时间表并加速市场进入的巨大潜力。这些试验以省略并行对照组的遗漏以及没有随机化或盲目的开放设计的融合而获得的,由于其加速器开发时间表,因此获得了有利的比较与调用随机对照试验的比较。相比之下,许多末期肿瘤或罕见肿瘤的患者没有可用的标准治疗;设计对照组可能是不切实际的;出于道德原因,SAT可能更合适。监管机构在提供指导的指导中,例如中国,美国和欧盟,这些指导已经建立了与紧迫的医疗保健需求相一致的有条件批准框架3-5。FDA根据2002年至2021年在美国6的SAT获得了有条件的批准,在2015年至2022年之间,中国获得了53项此类批准。本社论讨论了有关适用性的注意事项
Volvo-EC18E-手册.pdf
环保驾驶 ................................................. 92 全身振动 ................................................. 93 挖掘规则 ................................................. 95 在危险区域内作业 ........................................ 96 附件 .............................................................. 106 附件、连接和断开 ........................................ 108 附件支架 ...................................................... 109 液压附件支架 ........................................ 112 压力释放 ...................................................... 114 铲斗 ............................................................. 115 偏置动臂 ...................................................... 116 特殊液压系统 ................................................ 118 破碎锤 ............................................................. 119 软管破裂阀 ........................................................ 125 履带 ............................................................. 126 起重物体 ........................................................ 127 信号图 ............................................................. 132 维修时的安全 ................................................ 135

迈向多模式BCI:外围控制对运动皮层活动和代理意识的影响
摘要 - 近年来,使用运动图像的大脑计算机界面(BCI)显示出一些局限性在控制质量方面。为了改善这项有前途的技术,一些研究旨在与其他技术(例如眼睛跟踪)开发混合BCI,这些技术显示出更可靠的可靠性。但是,在机器人控制中使用眼动仪可能会自身影响机构感(SOA)(SOA)和用于运动图像(MI)区域的大脑活动。在这里,我们探讨了代理意识与运动皮层活动之间的联系。为此,我们使用了投影在表面上的虚拟臂,该虚拟手臂由运动捕获控制或使用眼迹器凝视控制。我们发现,在凝视控制任务期间,电动机皮层有一项活动,并且对预计的机器人臂的控制会带来显着差异,这与观察机器人移动的情况有很大的差异。

具有动态结构参数的滑臂四轴飞行器飞行控制
摘要 — 介绍了一种新型四轴飞行器的概念设计和飞行控制器。该设计能够在飞行过程中改变无人机的形状,以实现位置和姿态控制。我们考虑动态重心 ( CoG ),它会导致无人机的转动惯量 ( MoI ) 参数不断变化。这些动态结构参数在系统的稳定性和控制中起着至关重要的作用。四轴飞行器臂长是一个可变参数,它由基于姿态反馈的控制律驱动。MoI 参数是实时计算的,并纳入系统的运动方程中。无人机利用螺旋桨的角运动和可变的四轴飞行器臂长进行位置和导航控制。重心的运动空间是一个设计参数,它受执行器限制和系统稳定性要求的限制。提供了有关运动方程、飞行控制器设计和该系统可能应用的详细信息。此外,通过航路点导航任务和复杂轨迹跟踪的比较数值模拟对所提出的变形无人机系统进行了评估。

单臂双峰浆体折射率传感器的理论和实验分析
摘要:在本文中,我们在理论上和实验上都研究了双峰干涉传感器的敏感性,其中干涉发生在两个具有不同特性的等离子模式之间,在同一物理波导中传播。与众所周知的Mach- Zehnder干涉测定法(MZI)传感器相反,我们首次表明双峰传感器的灵敏度与传感面积长度无关。通过将理论应用于组成的铝(AL)等离子条纹波导的集成等离子双峰传感器来验证这一点。使用不同长度的等离子条带进行了数字模拟的一系列这种双峰传感器,证明了所有传感器变体的散装折射率(RI)敏感性,证实了理论上的结果。还通过芯片级RI传感实验对三个制造的SU-8/Al Bimodal传感器进行了芯片级RI传感实验,以50、75和100 µm的血浆传感长度进行了实验验证。发现获得的实验性RI敏感性分别非常接近,等于4464、4386和4362 nm/riU,这证实了感应长度对双峰传感器敏感性没有影响。上述结果减轻了设计和光损失约束,为更紧凑,更强大的传感器铺平了道路,可以在超短声感应长度下实现高灵敏度值。

一种用于机器人臂和刚体的基于量子计算的新算法
1机械工程系,魁北克大学氢和研究所的机械工程系,3351 BOULEVARD DES FORGES,TROIS-RIVIères,QC G8Z 4M3,加拿大,电子邮件,电子邮件:nadjet.zioui@uqqtr.ca 2 Ezzouar,16111年,阿尔及利亚,阿尔及利亚,电子邮件:yousra.mahmoudi@uqtr.ca 3城市液压部,国立液压学院Arbaoui Abdallah,29号,布里达路线29,阿尔及利亚4Véo4Véo项目,Sherbrooke,Sherbrooke,2500 de l'电子邮件:aicha.mahmoudi@usherbrooke.ca 5流程控制实验室,国家理工学院,阿尔及利亚,阿尔及利亚,电子邮件:mohamed.tadjine@g.enp.enp.edu.dz 6工程与科学学院,挪威西部挪威大学应用科学大学,北挪威大学,北北,5063,5063,Email,电子邮件: say.bentouba@hvl.no
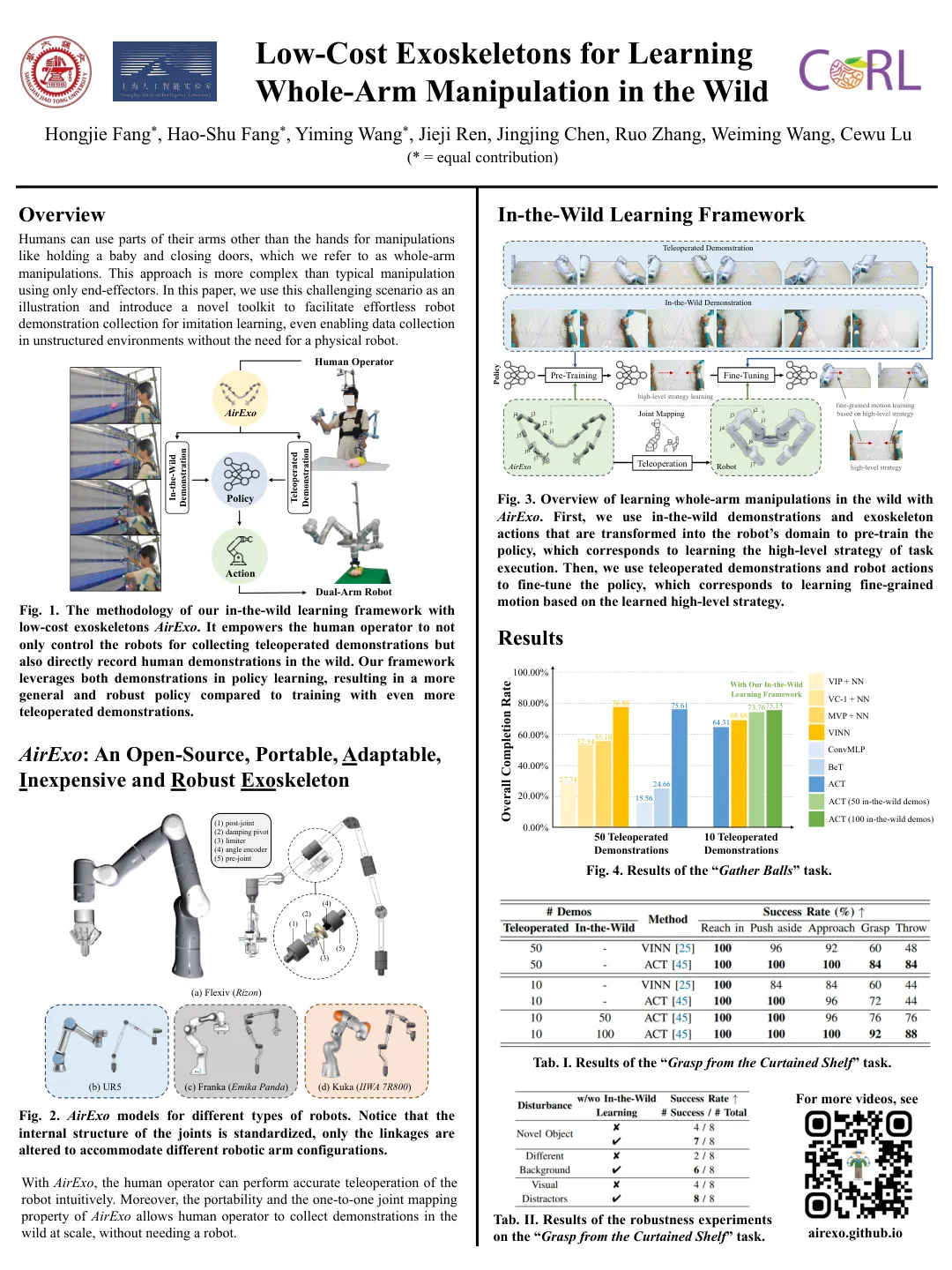
低成本外骨骼用于学习野生武器的全臂操纵
人类可以使用手臂的一部分,而除了握住婴儿和闭门的操作,我们称之为全臂操纵。这种方法比仅使用最终效应的典型操作更为复杂。在本文中,我们将这种具有挑战性的场景用作插图,并引入一种新颖的工具包来促进轻松的机器人演示收集以模仿学习,甚至可以在无需物理机器人的情况下在非结构化环境中启用数据收集。