XiaoMi-AI文件搜索系统
World File Search System双眼

双眼摄像机应用程序:视障
第二部分仍然保密,详细介绍了涉及Feedgy的PV温室试点系统的现实应用程序。本节提供了配备辐照传感器的实验设置。分析了自2024年2月以来收集的数据,以了解温室内的辐照行为。开发了一种基本的辐照模型,称为组成模型。该模型使用简化的光学,物理和几何系数结合了用于扩散辐照度的光学VF模型与直接辐照模型。模型验证和对实验数据的分析表明,该模型可以有效地执行,尤其是在阴天天数,显示内部和外部辐照行为之间的线性相关性很强。尽管具有简单性和效率,但由于试验系统和数据质量的限制,该模型仍存在局限性。尽管如此,它为APV市场中目前普遍存在的更复杂和计算密集的方法提供了一种有希望的替代方法。
双眼立体>的SGM算法介绍
•对两个图像中的相应像素的搜索如果进行了校准,则两个图像的搜索变得容易一些 - 这意味着,如果两个图像中的同一行中存在一对相应的像素。您从我的讲座24中知道,对于任何给定的像素(i,j)∈I,在另一个图像中必须在另一个图像中对其相应的像素进行搜索。,正如我在第24堂课中所解释的那样,
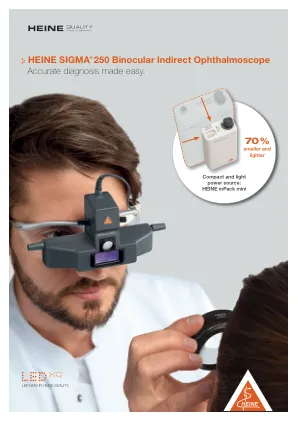
HeineSigma®250双眼间接眼镜
Heine Mpack Mini - Sigma 250的紧凑和光电源。新型高性能电源Heine Mpack Mini提供了从将用户绑在桌子,墙壁或静态电源来源的电缆上。重量仅为95 g,尺寸为44 x 23 x 101毫米,该移动电源现在约为大约。比其前身小70%。

增强了双眼视觉的救援机器人
摘要:在自然灾害,事故,医疗紧急情况和其他事件等紧急情况下的救援工作充满了挑战和危险。考虑到救援人员的安全和救援任务的紧迫性,有必要使用救援机器人执行环境检测和救援任务。该项目旨在通过整合双眼视觉技术来增强搜索和救援机器人的功能。通过为这些机器人提供复杂的双目系统,我们旨在改善其深度感知,对象识别和整体情境意识。该项目将涉及与现有机器人平台集成的专业视觉系统的开发。最终目标是使救援机器人能够进行更有效的导航和反应能力,从而提高其在批判性搜索和救援任务中的效率和成功。
儿童注视策略和双眼眼动摄影术:可行性和相关性
本文件是经过答辩评审团批准的大量工作的结果,并向整个大学社区提供。它受作者知识产权的保护。这意味着使用本文档时有义务引用和引用。此外,任何伪造、剽窃或非法复制行为都将受到刑事起诉。联系方式:ddoc-theses-contact@univ-lorraine.fr

实时3D语义场景感知具有双眼视觉的自我中心机器人
摘要 - 在室内移动的同时,感知具有多个对象的三维(3D)场景对于基于视觉的移动配件至关重要,尤其是对于增强其操纵任务的尤其是。在这项工作中,我们为具有双眼视觉的自我中心机器人提供了实例分割,特征匹配和点集注册的端到端管道,并通过拟议的管道展示了机器人的抓地力。首先,我们为单视图3D语义场景分割设计了一个基于RGB图像的分割方法,并利用2D数据集中的常见对象类将3D点封装在对象实例的点云中,通过相应的深度映射。接下来,根据先前步骤中匹配的RGB图像中感兴趣的对象之间的匹配关键,提取了两个连续的点云的3D对应关系。此外,要意识到3D特征分布的空间变化,我们还根据使用内核密度估计(KDE)的估计分布(KDE)来称量每个3D点对,随后可以使稳健性具有较小的中心范围,同时求解点云之间的刚性转换。最后,我们在7-DOF双臂Baxter机器人上测试了我们提出的管道,并使用安装的Intel Realsense D435i RGB-D相机测试了我们的管道。结果表明我们的机器人可以在移动时分割感兴趣的对象,注册多个视图,并掌握目标对象。源代码可在https://github.com/mkhangg/semantic Scene感知上获得。

青光眼监测实践服务指南
为了提供连续的护理,我们要求医院提供临床基线数据、管理计划和影像,如下所示:• 完整的患者详细信息,包括姓名、地址、联系电话、全科医生执业情况。• UHS 上次就诊日期• UHS 前任临床医生确定的复查间隔• 下次评估的目标日期• 患者的眼部病史,包括诊断。• 当前正在服用的眼部药物(如果有)• 过敏症• 双眼上次就诊时的视力• 双眼上次记录的眼压 (IOP)• 双眼的峰值眼压 (IOP)• 双眼的中央角膜厚度 (CCT)• 上次审阅者的管理计划和意见• 双眼视神经头和视网膜神经纤维层 OCT 报告• 双眼视野图(中央 24-2)
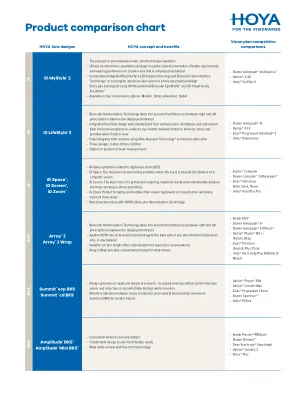
产品对比表 - HOYA Vision Care
• 无限设计变化的个性化巅峰之作 • 利用交互式咨询程序收集患者信息、生活方式要求和佩戴偏好,以创建独特个性化的镜片 • 结合集成双面 (iD) 设计技术和双眼协调技术™ 实现理想的双眼视觉,实现真正个性化的设计 • 每一副都采用 HOYA 专利的双眼模型™ 和 3D 视觉敏锐度模拟™ 设计 • 提供四种便捷选项:现代、细节、冒险、稳定
海马 - 枕骨连通性反映了佛塔的自传记忆缺陷
1图像强度用于描述双眼竞争任务的结果,而精神成像的生动性用于描述VVIQ的结果。尽管这两个任务都是相关的,但VVIQ测量了生动,而双眼竞争任务的维度却没有明确定义。