XiaoMi-AI文件搜索系统
World File Search System双眼

晚餐是什么?牙科侦探 - 课程计划
动物头骨旨在支持特定功能,包括获取食物,收集感觉信息以及保护大脑免受创伤。可以根据其头骨的设计来理解动物的饮食和社会模式。哺乳动物中有四种主要的牙齿:切牙,犬科,前磨牙和磨牙。食肉动物往往具有长犬牙,用于撕裂和撕裂肉。此外,食肉动物在嘴巴的后部有锋利的磨牙,用于进一步撕裂和切碎肉。食肉动物倾向于具有双眼视力,它们的眼睛位于头部的正面,这会导致较小的视野,但允许捕获猎物所需的深度感知。食草动物倾向于有扁平的前磨牙和磨牙,通常在顶部有锋利的山脊。食草动物通常没有犬齿,它们的切牙通常很大,因此可以使用它们从树枝上剪掉树叶。食草动物通常是其他动物的猎物,因此他们通常将目光投向头部。这为他们提供了更广阔的视野,以便他们可以更早发现掠食者并有机会逃跑。杂食动物通常具有各种牙齿。人类,负鼠和浣熊是杂食动物,因为他们吃了各种食物(肉类和植物材料),因此需要各种牙齿。通常,杂食动物像食肉动物一样在头部的前面。
![arxiv:2408.01615v2 [cs.ro] 2024年8月6日](/simg/5\53b7e87b4c6b06d92826cac01b479b9fc9dd556b.webp)
arxiv:2408.01615v2 [cs.ro] 2024年8月6日
摘要 - 连续机器人可以将直径为几毫米的小毫米。在其中,缺口管状连续机器人(NTCR)在许多精致的应用中都具有巨大的潜力。机器人建模的现有作品的重点是运动学和动力学,但仍面临重复机器人形态的挑战,这是可以扩大连续机器人的研究景观的重要因素,尤其是对于那些具有不对称连续性结构的人。本文提出了一种基于双立体声视觉的方法,用于毫米尺度NTCR的三维形态重建。该方法采用两个相对位置的固定双眼摄像机来捕获NTCR的点云,然后利用预定义的几何形状作为KD树方法的参考来重新安置捕获点云,从而导致形态上正确的NTCR,尽管有低量的原始点云集合。该方法已被证明是直径3.5 mm的NTCR可行的,在16个Notch特征中捕获了14个NTCR,其测量值通常以1.5 mm的标准为中心,表明了揭示形态学细节的能力。我们提出的方法为3D形态重建毫无模型的研究铺平了道路。

评论:视网膜母细胞瘤治疗的新视野
视网膜母细胞瘤 (Rb) 是由未成熟视网膜母细胞引起的原发性神经外胚层肿瘤,占儿童所有癌症的 3%。它是儿童最常见的眼内恶性肿瘤 [1]。该疾病通常表现为累及单眼或双眼的单灶性或多灶性肿瘤 [2]。目前,Rb 有许多有效的治疗方法,包括局部治疗(激光治疗、冷冻治疗和放射治疗)、全身化疗、创新的新型药物输送方法(玻璃体内和眼内化疗)以及眼球摘除术以防止眼外扩散和转移以及随后的死亡 [3]。复发性肿瘤的治疗取决于疾病的程度、肿瘤病灶的侧面性和数量(单灶、单侧、多灶)、肿瘤的大小和位置、有无玻璃体和视网膜下种植、儿童的年龄和一般健康状况以及之前的治疗。国际眼内视网膜母细胞瘤分类和眼内视网膜母细胞瘤分类系统是全球范围内主要的眼内 Rb 分类方法 [ 4 ](表 1)。由于肿瘤内异质性、化学耐药表型以及药物输送到眼部的障碍,Rb 仍然是一个主要的公共卫生问题
医疗内窥镜检查实时3D重建的进步
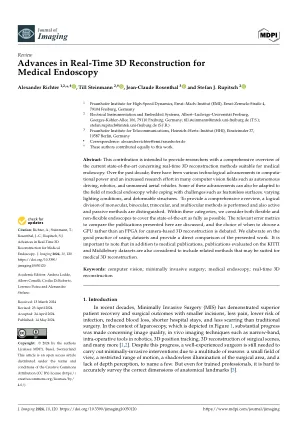
摘要:此贡献旨在为研究人员提供有关适用于医疗内窥镜检查的实时3D重建方法的最新最新概述。在过去的十年中,计算能力方面已经取得了各种技术进步,并且在许多计算机视觉领域(例如自动驾驶,机器人技术和无人驾驶航空车辆)的研究工作增加了。其中一些进步也可以适应医疗内窥镜检查领域,同时应对诸如无特征表面,不同的照明条件和可变形结构等挑战。为提供全面的概述,进行了单眼,双眼,三眼和多眼方法的逻辑划分,并区分了主动和被动的方法。在这些类别中,我们认为柔性和非弹性内窥镜都尽可能充分地覆盖最新的内窥镜。讨论了与此处介绍的出版物进行比较的相关错误指标,并且在讨论了何时选择GPU而不是FPGA的基于摄像机的3D重建的选择。我们详细阐述了使用数据集的良好实践,并直接比较了提出的工作。重要的是要注意,除了医学出版物外,还认为对Kitti和Middlebury数据集进行评估的出版物还包括可能适用于医疗3D重建的相关方法。

视觉信息处理评估-矫正视力- ...
会聚不足:在近距离工作时无法维持双眼功能(保持两只眼睛协同工作)。通常,当聚焦近距离的单词或物体时,一只眼睛会向外转(间歇性外斜视)(AAPOS,2020 年)。内斜视:一种斜视(眼睛错位),其特征是一只或两只眼睛向内转。它可能是间歇性的或持续性的,可能在近距离注视、远距离注视或两者时发生。交叉可能主要发生在一只眼睛上,也可能在两只眼睛之间交替发生。它与斜视或外斜视相反。内斜视可能发生在任何年龄(AAPOS,2019 年)。外斜视:一种斜视形式,其中一只或两只眼睛向外转动。它与斜视或内斜视相反。外斜视可能不时发生(间歇性外斜视)或可能持续发生,并且在每个年龄组中都有发现(AAPOS,2019)。遮盖疗法:遮盖或遮盖疗法是弱视治疗的主要方法。遮盖未受影响或好的眼睛可为弱视眼提供单眼刺激,促进视觉发育。遮盖疗法用于改善视力,通常不能消除斜视(AAPOS,2021)。视轴矫正疗法:在验光办公室进行的一系列练习,通常每周进行一次,持续数月。视轴矫正眼部锻炼(视轴矫正术)由儿科眼科医生和视轴矫正师使用,是改善双眼功能的眼部锻炼,在办公室教授并在家中进行。视轴矫正术是由眼科专科内的视轴矫正师执行的一项成熟的职业。视轴矫正师评估和测量眼球偏差,管理弱视治疗并治疗间歇性小症状性眼球偏差(AAPOS,2020 年)。也称为视觉治疗。视轴矫正术专业包括视觉系统疾病的评估和治疗,特别是涉及双眼视觉和眼球运动 [美国认证视轴矫正师协会 (AACO) 2018]。药物惩罚疗法:滴入药物滴剂(例如阿托品)以惩罚视力较好的眼睛,迫使大脑注意来自视力较弱的眼睛的图像,促使大脑学会用视力较弱的眼睛看得更好(AAPOS,2021 年)。棱镜适应疗法:使用透明的三角形物体弯曲光线以允许视轴对齐,模拟斜视的缺失。还提出了更准确地确定偏差角度或目标角度,以确定斜视手术的偏差角度或目标角度 [美国眼科学会 (AAO),2018]。斜视:眼睛错位。斜视最常见的描述是眼睛错位的方向,例如内斜视、外斜视和上斜视 (AAPOS,2020)。视力恢复治疗 (VRT):一种基于计算机的家庭程序,旨在加强因创伤、中风、炎症或选择性手术切除脑肿瘤而导致的神经系统急性损伤后幸存的残留神经结构的视觉信息处理。有人认为,通过在治疗过程中反复激活,个人可以使用该计划来训练和改善其受损的视觉功能,从而在视野缺损中恢复有用的视力(NovaVision,2021 年)。视觉治疗:验光师将视觉治疗定义为发展或提高视觉技能和能力的尝试;提高视觉舒适度、轻松度和效率;并改变视觉信息的视觉处理或解释。视光学视觉治疗计划包括在数周至数月内进行的监督下在办公室和家中进行的强化练习。除了练习之外,还可以使用镜片(“训练眼镜”)、棱镜、滤光片、贴片、电子目标或平衡板(AAPOS,2020 年)。适用代码以下程序和/或诊断代码列表仅供参考,可能并不全面。本政策中列出的代码并不意味着代码描述的服务是涵盖的或不涵盖的健康服务。健康服务的福利覆盖范围由会员特定的福利计划文件和可能要求覆盖特定服务的适用法律决定。包含代码并不意味着任何报销权利或保证索赔支付。其他政策和指南可能适用。
使用电脑改编音乐进行神经调节,治疗对功能性神经障碍标准干预措施无反应的十岁儿童
介绍 在转诊前三周,MT 一直患有病毒感染:流鼻涕、打喷嚏、鼻塞和前额头痛。患病第二周,她出现右眼视力模糊、颈部僵硬、眼球运动时疼痛、面部疼痛、嗜睡和厌食。在被诊断为部分治疗的脑膜炎后,她被送往医院接受静脉注射抗生素治疗(五天疗程)。拭子检测结果呈鼻病毒阳性。患病第三周,她的头痛持续存在,视力模糊蔓延到双眼,并出现了其他神经系统症状:步态不稳和说话困难(含糊不清)。几天后,她开始神志不清,显得“茫然”,对儿科医生的问题反应迟钝,并且开始出现言语不清、右手无力、偶尔颤抖、右下颌抽搐和持续站立不稳,需要借助助行架才能行走。常规血液检查(全血细胞计数、电解质、炎症标志物和甲状腺功能测试)均正常。增强 CT 扫描和 MRI 也正常,偶然发现了 Chiari 畸形(4 毫米)。腰椎穿刺被认为可能不安全,因此未进行。神经科医生的检查得出了功能性神经系统疾病(FND)和共病复杂/慢性疼痛(见文本框 1)的诊断。*

ROBOTX 2024技术设计论文
ix。r eferences [1]“海军3.0 evo- ePropulsofion舷外马达”,露营车和海洋有限公司。https://camperandmarine.com/products/navy-3-0--0--3kw?srsltid = afmboopo1zcp9px_m8888tjbakpzp o_w5tkxgqqlgdxnrxnrxnrxqeiaia1qibbrzg ePropulsion。https://www.epropulsion.com/e-series-batteries/ [3] R. Blake和H. Wilson,“双筒望远镜”,Vision Research(牛津),第1卷。51,否。7,pp。754–770,2011,doi:10.1016/j.visres.2010.10.009。[4] Z. Yin,X。Ren,Y。du,F。Yuan,X。He和F. Yang,“基于定时校正的双眼相机校准”,Applied Optics(2004),第1卷。61,否。6,pp。1475–1481,2022,doi:10.1364/ao.450271。[5] L. Cao,“改进了USV快速路径计划的遗传算法”,MIPPR 2015:遥感图像处理,地理信息系统和其他应用程序,Bellingham:Spie:2015,pp。981529-981529–6。doi:10.1117/12.2210736。[6] NAVTECHGPS,“ R632 GNSS接收器 - NAVTECHGPS”,NAVTECHGPS,5月4日,2022年。https://www.nav.navtechgps.com/r632-gnss-com/r632-gnss-receiver/ [7] 2021. https://www.navtechgps.com/hemisphere_a25_gn ss_antenna/ [8] “MN4014 Navigator Type UAV Multi-Motor KV400_Navigator Type_Motors_Multi-rotor UAV Power_T-MOTOR Official Store-Multi- rotor UAV,Fixed Wing,VTOL,FPV and Robot Power.” https://store.tmotor.com/product/mn4014-kv400-motor-navigator-type.html [9]“ X650套件”,Holybro Store。https://holybro.com/products/x650-
研究生手册
高阶PFC执行功能的Boulder神经影像学(fMRI)的CO的。 具体来说,认知(思想和记忆),情感(生理反应)和运动(行为反应)的抑制性调节过程洛拉·海恩斯教授(术语)博士学位。 1995年,路易斯维尔大学的认知与社会/认知发展发展,对有效的育儿和互动阅读,成就动机和专业知识的发展具有特定的兴趣,专注于视觉艺术,Zijiang博士他教授博士学位。 1990年,大学。 <阿拉巴马州的,伯明翰的视觉感知和认知:真实和虚拟环境中的空间感知和动作,双眼视觉,视觉表面表示,注意力和记忆,多感知感知以及视觉神经科学玛丽亚·康多罗夫(Maria Kondaurova)博士副教授博士。 2008年,普渡大学的声学特征是婴儿指导的言语和语言发展的正常听力和听力受损的婴儿/儿童;触觉信息在听力障碍的婴儿/儿童语言获取中的作用;对婴儿指导的语音的影响和情绪,对正常听力和听力受损的婴儿/儿童;第二语言获取中语音的知觉学习/听觉分类。 Cheri Levinson博士副教授博士2015年,圣路易斯的华盛顿大学了解社交焦虑症和饮食失调之间的高水平合并症以及为饮食失调的新干预措施。具体来说,认知(思想和记忆),情感(生理反应)和运动(行为反应)的抑制性调节过程洛拉·海恩斯教授(术语)博士学位。 1995年,路易斯维尔大学的认知与社会/认知发展发展,对有效的育儿和互动阅读,成就动机和专业知识的发展具有特定的兴趣,专注于视觉艺术,Zijiang博士他教授博士学位。 1990年,大学。,伯明翰的视觉感知和认知:真实和虚拟环境中的空间感知和动作,双眼视觉,视觉表面表示,注意力和记忆,多感知感知以及视觉神经科学玛丽亚·康多罗夫(Maria Kondaurova)博士副教授博士。 2008年,普渡大学的声学特征是婴儿指导的言语和语言发展的正常听力和听力受损的婴儿/儿童;触觉信息在听力障碍的婴儿/儿童语言获取中的作用;对婴儿指导的语音的影响和情绪,对正常听力和听力受损的婴儿/儿童;第二语言获取中语音的知觉学习/听觉分类。Cheri Levinson博士副教授博士2015年,圣路易斯的华盛顿大学了解社交焦虑症和饮食失调之间的高水平合并症以及为饮食失调的新干预措施Cheri Levinson博士副教授博士2015年,圣路易斯的华盛顿大学了解社交焦虑症和饮食失调之间的高水平合并症以及为饮食失调的新干预措施

病例系列药物分析打印名称: Revaxis 疫苗 VAP
名称:Revaxis 疫苗 VAP 报告运行日期:2024 年 2 月 19 日 数据锁定日期:2024 年 2 月 16 日 18:30:04 最早反应日期:1983 年 5 月 1 日 MedDRA 版本:MedDRA 26.1 反应名称 总计 致命 眼部疾病 结膜感染、刺激和炎症 过敏性结膜炎 1 0 眼睑运动障碍 眼睑痉挛 1 0 流泪障碍 流泪增多 1 0 眼睑、睫毛和泪道感染、刺激和炎症 眼睑红斑 1 0 眼睑水肿 2 0 眼睑肿胀 6 0 眼部疾病 NEC 眼痛 14 0 眼肿胀 20 0 眶周肿胀 1 0 眼部感染、炎症和相关表现 眼部刺激 5 0 眼部瘙痒 5 0 眼充血 8 0 眼部神经和肌肉疾病 双眼眼球运动障碍 1 0 眼球运动障碍 31 0 凝视麻痹 2 0 斜视 1 0 眼部感觉障碍 视疲劳 3 0 畏光 31 0 眼眶感染、炎症和刺激 眼球突出症 1 0 瞳孔疾病 瞳孔散大 11 0 瞳孔固定 2 0 视网膜、脉络膜和玻璃体感染和炎症 视网膜血管炎 1 0 视觉色彩扭曲 黄视症 1 0 NEC 视觉障碍 复视 3 0 闪光幻觉 3 0 视力模糊 36 0 视力障碍和失明(色盲除外) 一过性黑朦 1 0 失明 3 0 短暂性失明 3 0 视力障碍 15 0 眼部疾病 SOC 总计 214 0

robotics中的视觉伺服 - ijprems.com
纸张涉及视觉伺服(VS),这是一种使用视觉信息引导机器人的众所周知的方法。在这里,将图像处理,机器人技术和控制理论组合在一起,以控制机器人的运动。该主题解释了VS的分类以及不同的相机配置及其控件。它还涵盖了图像处理,姿势估计,立体声视觉和摄像机校准,以机器人概念为例。图像处理包括两个基本操作:图像分割和图像解释。姿势代表机器人的位置和方向,该位置和方向是通过分析溶液,相互作用矩阵和算法溶液估算的。立体视觉代表基于机器人左和右眼(相机)对象图像之间的双眼差的对象深度的计算。对象的深度是通过四种基本方法计算的:来自平面同构象的表现几何,三角剖分,绝对取向和3D重建。摄像机校准是确定特定相机参数的过程,以便使用指定的测量完成操作。此外,它还侧重于基于3D视觉伺服和深层神经网络的机器人操纵(在学校中的娱乐场所),非线性鲁棒性视觉伺服器控制,用于机器人柑橘的收获,基于图像的磁滞性减少,以减少灵活的内窥镜仪器(Laparososcic Robotic robotic Sulobots)。