XiaoMi-AI文件搜索系统
World File Search System双线
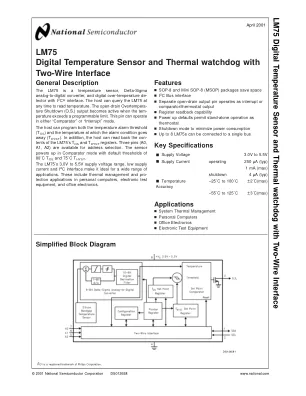
LM75 数字温度传感器和热看门狗,带双线接口
LM75 是一款温度传感器、Delta-Sigma 模拟数字转换器和数字过温检测器,带有 I 2 C ® 接口。主机可以随时查询 LM75 以读取温度。当温度超过可编程限制时,开漏过温关断 (O.S.)输出变为活动状态。此引脚可以在“比较器”或“中断”模式下运行。主机可以编程温度报警阈值 (T OS ) 和报警条件消失的温度 (T HYST )。此外,主机可以读回 LM75 的 T OS 和 T HYST 寄存器的内容。三个引脚 (A0、A1、A2) 可用于地址选择。传感器在比较器模式下启动,默认阈值为 80˚C T OS 和 75˚C T HYST 。

LM75 数字温度传感器和热看门狗,带双线接口
I 2 C 数字开关特性 除非另有说明,否则这些规格适用于 LM75CIM-5 和 LM75CIMM-5 的 +V S = +5 Vdc 和 LM75CIM-3 和 LM75CIMM-3 的 +V S = +3.3 Vdc,输出线上的 C L(负载电容)= 80 pF,除非另有说明。粗体限制适用于 T A = T J = T MIN 至 T MAX ;所有其他限制 T A = T J = +25˚C,除非另有说明。LM75 的开关特性完全符合或超出了 I 2 C 总线的已发布规格。以下参数是与 LM75 相关的 SCL 和 SDA 信号之间的时序关系。它们不是 I 2 C 总线规格。
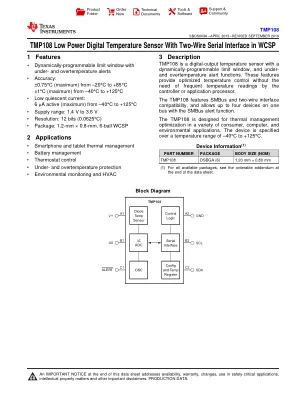
TMP108 低功耗数字温度传感器,带 WCSP 封装的双线串行接口
从 TMP108 读取时,写入操作存储在指针寄存器中的最后一个值用于确定读取操作读取哪个寄存器。要更改读取操作的寄存器指针,必须将新值写入指针寄存器。此操作通过发出 R/W 位低的从地址字节,然后发出指针寄存器字节来完成。无需其他数据。然后,主机可以生成起始条件并发送 R/W 位高的从地址字节以启动读取命令。有关此序列的详细信息,请参见图 3。如果需要从同一寄存器重复读取,则无需连续发送指针寄存器字节,因为 TMP108 会存储指针寄存器值,直到下一次写入操作更改它为止。
WCSP 封装带双线接口的低功耗数字温度传感器数据表 (Rev. A)
从 TMP108 读取时,写入操作存储在指针寄存器中的最后一个值用于确定读取操作读取哪个寄存器。要更改读取操作的寄存器指针,必须将新值写入指针寄存器。此操作通过发出 R/W 位为低的从属地址字节,然后发出指针寄存器字节来完成。无需其他数据。然后,主机可以生成启动条件并发送 R/W 位为高的从属地址字节以启动读取命令。有关此序列的详细信息,请参见图 3。如果需要从同一寄存器重复读取,则无需连续发送指针寄存器字节,因为 TMP108 会存储指针寄存器值,直到下一次写入操作更改它为止。
2023-2024 学年图书清单
1. 印象 - 2 Sunbeam 词典 1. 牛津英语迷你词典 文具 数量 双线练习册 140 页 4 双线插页练习册 140 页 4 单线练习册 140 页 3 小支票练习册 140 页 2 普通艺术 60 页 1 Jk Everwhite A4 75 GSM 300 张密封包装 1 类别 - 3 主题 书名 出版商 英语 1. 语法室 - 3 Acevision 2. 新木兰英语读本 - 3 东方黑天鹅 3. 新木兰英语练习册 - 3 东方黑天鹅 4. 学习草书笔画 - 3 Sunbeam 印地语

TMP117 高精度、低功耗、数字温度传感器,带 SMBus™ 和 I2C 兼容接口数据表 (Rev. D)
6.1 绝对最大额定值 ...................................................... 5 6.2 ESD 额定值 .............................................................. 5 6.3 建议工作条件 .............................................................. 5 6.4 热信息 ...................................................................... 5 6.5 电气特性 ...................................................................... 6 6.6 开关特性 ...................................................................... 7 6.7 双线接口时序 ............................................................. 7 6.8 时序图 ...................................................................... 8 6.9 典型特性 ...................................................................... 8

无人机惯性在线测量...
动力学模型及其参数的辨识是机器人技术和系统动力学建模领域的基本问题之一。对于物体具有六个自由度 (6-DOF) 的一般情况,例如无人机 (UAV) 的情况,关键物理参数是飞行器质量和转动惯量。尽管无人机质量及其几何/拓扑结构很容易获得,但考虑到惯性张量无法通过静态试验测量,因此很难辨识。本文介绍了一种基于双线摆和机载集成传感器系统的简单有效的刚体惯性在线估计方法。其中,测试对象(即无人机)由两根细平行线悬挂,形成绕垂直轴的双线扭摆。使用无人机飞行控制器 (FC) 单元的机载传感器记录和处理摆锤振动,以获得用于最终惯性估计阶段的无趋势和无噪声信号。针对与无人机控制箱和完整无人机配置相关的两个典型悬浮物体案例,通过实验验证了所提出的识别算法。

FS3000 数据表 | Renesas
FS3000 包括一个 I 2 C 数字双线接口,该接口带有一条双向数据线 (SDA) 和一条时钟线 (SCL)。这两条线为开漏,并通过两个上拉电阻 (Rp) 连接到电源电压。FS3000 在 I 2 C 总线上作为从设备运行,支持 100kHz 和 400kHz 比特率。