XiaoMi-AI文件搜索系统
World File Search System双臂

双臂移动操纵器-RB-Y1
脚踝滚动垩堋堉°/s, - - 堋堉°〜°踝倾斜垩堋堉°/s, - 堏堉°〜°膝关节, - h°/s, - 垩堍堉°〜°hip hip patper垩堑堉°/s, - hip lip lip lip lip to -Y°〜°肩倾斜垩堑堉°/s, - shoulder°〜°肩compry°/s,堉°〜°〜°〜°肩yaw°/s, - 垩堋堉°〜°〜°弯头p Proitk垩堑堉°/s/s, - s, - 垩堎堉°〜°〜堉°wrist YAW YAW YAW YAW°°°°°°。堌堏堉°/s, - 垩堉堉°〜°腕偏航堋°/s, - 垩堐堉°〜°

朝基于视觉的双臂机器人水果收获
摘要 - 近年来,由于诸如提高生产力和劳动力降低等福利,对农业机器人技术的兴趣已大大增加。但是,与非结构化环境相关的当前问题使机器人收割机的发展具有挑战性。大多数农业机器人技术的研究都集中在单臂操纵上。在这里,我们提出了一种双臂方法。我们提出了配备了RGB-D相机,切割和收集工具的双臂果实收集机器人。我们利用合作任务描述来最大化双臂机器人的功能。我们设计了一个基于分层的二次编程控制策略,以实现与机器人和环境相关的一系列硬约束:机器人联合限制,机器人自我收集,机器人 - 水果和机器人树的碰撞。我们结合了深度学习和标准图像处理算法,以检测和跟踪现场的树干。我们验证了对现实世界RGB-D图像的感知方法以及对模拟实验的控制方法。

双臂机器人系统的现场性能
应将通讯发送给StanisławLem:s tanislawl@pec.unipd.it文章IFIC杂志机器人Spectrum(https://anapub.co.ke.ke/journals/jrs/jrs/jrs.html) 2023;从2024年3月2日修订; 2024年4月2日接受。2024年5月23日在线可用。©2024作者。由Anapub出版物出版。这是CC BY-NC-ND许可证下的开放访问文章。(http://creativecommons.org/licenses/by-nc-nd/4.0/)摘要 - 这项研究中正在解决的机器人设备有两个武器:一个用于选择水果,另一个用于切碎它。手臂在使用相机的复杂视觉系统的帮助下找到并定位豆荚。在这个人类机器人的工作流程中,操作员选择了他们想要采摘的西红柿,然后机器人进行了实际采摘。机器人管理和通信系统使用Ethercat Bus与图形用户界面(GUI)创建链接,从而实现人类管理和控制。该项目的目的是创建和评估配备双臂的机器人系统,用于收获西红柿。该系统结合了一个配备两个机器人臂的移动模型和一个末端效应器,可提高番茄收集的效率。该系统使用GUI来增强机器人与人类操作员之间的相互作用。此外,它采用视觉模型来简化水果检测过程。这项研究的发现表明,HMI可能会显着提高番茄收集机器人的准确性。最后,开发3D模型存在一些困难,因为这项研究包括户外实验。
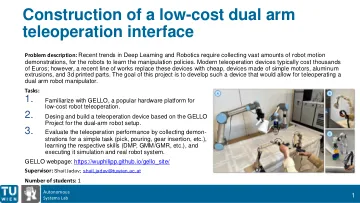
低成本双臂近距离界面的构建
问题描述:在此项目中,学生将采用深度强化学习(DRL)来发展机器人的操纵技巧,重点关注诸如接地操作和连接器插入等任务,这对于组装过程至关重要。选择特定的增强学习算法的灵活性允许探索各种DRL方法,例如基于价值的方法(例如DQN),基于策略的方法(例如PPO)或参与者 - 繁体架构。主要目标是设计一种控制策略,该策略使机器人能够通过与环境的互动来自主学习这些技能,从而通过反复试验和错误来提高其性能。

双臂架固定翼无人机实时控制算法...
摘要 - 无人驾驶飞行器 (UAV) 已广泛应用于经济、安全、军事等许多领域,包括空中拍摄、交通状态更新、在建建筑监视和娱乐……如今,无人机研究是最受关注的领域,尤其是在自主控制器方面。在本文中,我们提出了一种用于倒 V 型尾翼配置的固定翼无人机的实时控制算法模型,包括自动起飞阶段、航路点跟踪阶段和自动着陆阶段。该算法是在 matlab/simulink 上构建为标准化模型,并使用 PID 控制器进行实现。使用 X-Plane 模拟算法的性能 - X-Plane 是由 Laminar Research 开发并由美国联邦航空管理局 (FAA-USA) 认证用于训练飞行员的模拟器,它能够使用实时数据和最高精度进行模拟飞行

安装在航天器上的冗余空间操纵器的双臂协调
摘要本文解决了轨道机器人机器人的服务和组装中的重要挑战,这是为了克服机器人关节上的力量/扭矩的饱和挫折,并在捕获后阶段中,同时与未控制的大型Angular和线性动力进行了目标飞船,同时控制目标航天器。作者提出了一种基于两个鲁棒和效果控制算法的新颖解决方案:最佳控制分配(OCA)和非线性模型预测性控制(NMPC)。这两种算法都旨在最大程度地减少关节扭矩,航天器执行器矩,接触力和复合冗余系统的矩,其中包括通过双n-数度空间机器人机器人操纵器抓住的常见有效载荷(目标航天器)安装在Chaser spacececraft上。OCA算法仅使用当前状态和系统动力学小型量化二次成本函数,但NMPC还考虑了未来状态估计值和对指定预测范围的控制输入。它在计算上更多地参与,但在减少关节扭矩方面提供了优异的结果。迄今为止,将MPC应用于机器人技术的文献主要集中在线性模型上,但双臂配位是高度非线性的,并且在双臂协调中没有MPC应用。提出的离散技术(非线性模型)具有优雅和简单性的确切实现(非线性模型),但仍考虑了双臂协调系统的完整非线性模型。它在计算上非常有效。计算机仿真结果表明,所提出的算法有效地工作,最小扭矩,接触力和矩实现。开发的算法在跟踪问题方面也非常有效。

基于ROS的双机械臂协同感知抓取系统设计与实现
机器人手臂任务中的感知技术。通过分析机器人臂的运动学并设计双臂合作系统,将视觉点云技术结合起来,实现双臂合作握把,并通过使用ROS平台来验证合作社CON-TROL策略的有效性,从而构建双臂臂系统的实验平台。主要研究内容包括分析机器人ARM运动学的正和反向运动学模型,视觉点云识别在双臂合作任务中的应用,双臂合作控制策略的实现以及合作掌握的实验结果和分析。通过这项研究,成功设计和实现了基于ROS的双机器人臂合作感,并实现了双臂合作控制策略的有效性。

由早期手臂双臂强化疗法引起的变化,包括单侧脑瘫的幼儿的下肢
设计,设置和参与者这项前瞻性随机临床试验(2018年11月至2021年12月),包括2个平行组和1:1的分配,招聘在欧洲大学医院,脑瘫专业中心和自发应用在3个地点:比利时布鲁塞尔,比利时。布雷斯特,法国;和意大利比萨。匹配(包含年龄,病变类型,脑瘫原因和受影响的侧面)对随机分组。在基线(T1)后2周(T1)和基线后3个月(T2)评估了幼儿(T0)(T0)。医疗保健专业人员和主要结果评估者对小组分配视而不见。至少有23个年龄较大的儿童(每组),年龄在12至59个月中,患有痉挛性/运动障碍UCP,并且需要遵循指示。排除标准包括不受控制的癫痫发作,预定的肉毒杆菌毒素注射,计划在研究期之前或期间6个月内安排的骨科手术,严重的视觉/认知障碍或磁共振成像的禁忌症。

研究双臂合作机器人在石油钻井场中的应用
1安全,环境保护以及质量监督与检查研究所,CNPC Chuanqing钻探工程有限公司,Ltd。拆卸德里克斯(钻孔)。首先,引入了双臂协作机器人的基本概念和技术背景,然后讨论了其在Derricks的组装和拆卸中的特定应用程序及其面临的挑战。最后,总结了当前研究的进展,并提出了未来的发展方向。关键字:双臂协作机器人,德里克,组装和拆卸,拆卸,工业自动化I.随着工业自动化的快速发展,各个领域的机器人技术的应用范围和深度正在不断扩大。无论是制造业,医疗保健,农业还是服务行业,机器人技术都在逐渐改变传统的工作方式和提高效率和质量。在这种情况下,双臂协作机器人是一种可以模拟人手协调运动的高级设备,已经显示出前所未有的潜力。这种类型的机器人不仅可以执行复杂的操作任务,而且还可以通过精确的同步控制和强制反馈机制实现与环境和对象的高度相互作用。但是,传统的手动操作方法在效率和安全性方面存在明显的缺点。在石油钻井行业,Derrick(钻机)拆卸Dissemembly是一项至关重要且具有挑战性的任务。DerrickofDisassemblyThe Installation and Nipysembly Process涉及大量的重型零件和高精度操作,这需要工人具有丰富的经验和高度的协调。效率低下不仅会导致更长的运行时间和增加的成本,而且可能会对整体钻井进度产生负面影响。在高风险的工作环境中,很难完全保证工人的安全,
居家人体工学办公室
1) 坐在椅子上,十指交叉放在身体前方,手掌远离身体。轻轻伸直肘部并向前伸展。保持伸展 10-20 秒,重复 2 次。 2) 站立十指交叉,双臂举过头顶,手掌向上。保持伸展 10-15 秒。 3) 站立双臂举过头顶,抓住另一侧的肘部,左右倾斜。每侧保持伸展 8-10 秒。 4) 站立十指交叉,双臂举过头顶,手掌向上。保持伸展 15-20 秒。 5) 站立双臂放在身体两侧,向上和向后转动肩膀,保持 3-5 秒,重复 3 次。 6) 站立双臂在背后,用另一只手抓住手腕并拉动,同时将头歪向一侧。反向重复,每只手臂 10 – 12 秒。 7) 站立掌心朝上,十指朝上,双手向下推,保持 10 秒。 8) 站立掌心朝下,十指朝下,双手向上拉,保持 10 秒。 9) 坐在椅子上,将一只手臂伸过头顶,手掌向上,另一只手臂向下,手掌朝后。每侧保持伸展 8-10 秒。10) 坐在椅子上,交叉一条腿放在另一条腿上,将另一只手臂放在膝盖上,向开放侧扭转,每侧 8-10 秒。11) 坐下,将双手放在下背部支撑,向后倾斜,10-15 秒。12) 双臂站立放在身体两侧,向外甩动双手,8-10 秒。