XiaoMi-AI文件搜索系统
World File Search System反作用力
ansys-mechanical-suite-brochure-c.pdf - cadfem
计算结构系统的响应涉及分析各种物理现象:应力、变形、振动特性、反作用力和残余应变。为了得到准确的答案,模拟必须考虑产品各个部件之间的所有相互作用、其工作环境(如热条件)以及其他力(如电磁和流体动力学)的影响。捕获材料至关重要。所有这些复杂性都必须通过先进的求解器技术来有效处理,这些技术可以可靠地捕获所有细微差别,例如材料属性变化、接触状态和零件侵蚀。

福克兰群岛立法议会议事日程......
(c) 航空器失踪或完全无法接近; “委派代表”是指一国根据其资格指派的、为参加另一国进行的调查的人员; “顾问”是指一国根据其资格任命的、为协助其委派代表进行调查的人员; “机场当局”就机场而言,是指管理机场的人员; “航空器”是指在大气中能利用空气反作用力(空气对地球表面的反作用力以外的作用力)获得支撑的任何机器; “原因”是指如若消除或避免则可防止事故发生或可减轻所造成的伤害或损害的行为、疏忽、条件或情况; “首席调查员”是指根据第 8 条任命的首席航空事故调查员; “缔约国”是指《芝加哥公约》的任何缔约国; “促成因素”是指行为、疏忽、事件、情况或其组合,如被消除、避免或不存在,则可降低事故或事故征候发生的概率,或减轻事故或事故征候后果的严重性;“机组”包括运营人在飞行中的航空器上雇用或聘用的与航空器运行有关的所有人员,如果运营人和机长是同一个人,则包括机长;“专家”是指因事故造成其公民死亡或重伤而对事故有特殊利益的国家任命的人员;“致命伤害”是指人员在事故中受到的伤害,并导致其在事故发生之日起 30 天内死亡;“飞行记录仪”是指为补充事故或事故征候调查而安装在航空器上的任何类型的记录仪,包括飞行数据记录仪、驾驶舱语音记录仪和图像记录仪;

以下结构. . thatthereactionR \ /r 2l3t - jnit.org
单位 - il 2' 建筑物中的一根柱子高 4m,其底端固定,顶端铰接' 由梁产生的反作用力为 500 KN,偏心距截面主轴 60 mm。检查 ISHB 300 @0.5g KN/m 截面是否足够。.- vv Y7 v'JL (16) OR 2' a) ISA 125 mm x 75 mm x 8 mm 用作钢屋架中的不连续支撑' 如果螺栓连接中心之间的长度为 2.rm,则求其抗压强度。 -- ---D (6) b) 设计一个 3.5 米长的支柱,位于建筑物内,承受 550 KN 的分解载荷。支柱两端均采用受约束的间接和定位。使用 Fe 410 级钢材。 --J -vva..'r (10) 单位 - tII 3' 根据以下数据设计有效跨度为 6m 的横向支撑梁。钢材等级:Fe 410
腰椎椎体尸体标本和脊柱子单位
本文部分分为几个部分。被认为有必要引入/更新LBP以及腰椎生物力学和手术病理学的最新概念。首先,具有统计数据的脊柱和腰椎生物力学的最新进展;表1;引入。也提出了作者的评论,概念和标准。其次,向基于腰椎子单位的生物力学数学模型进行了简报。图2。最后,精确地指出了研究的目标。脊柱生物力学和脊柱病理学最近的进步腰椎在大多数一生中承担着大约500 N的腹部 - 腹部负荷:[1-3主要是]。但是,当任何患者举重时,磁盘的反作用力可能达到6.000 n [3]。原因是,勃起脊[3]产生了相当高的力量;弯曲时刻也有

飞机结构 - UF MAE
根据现行《联邦法规》第 14 篇 (14 CFR) 第 1 部分“定义和缩写”,飞机是一种用于或预期用于飞行的设备。用于对飞行员进行认证的飞机类别包括固定翼飞机、旋翼机、滑翔机、轻于空气的飞机、动力升力飞机、动力降落伞飞机和重量转移控制飞机。14 CFR 第 1 部分还将飞机定义为发动机驱动的固定翼飞机,其飞行依靠空气对机翼的动态反作用力。另一个尚未在 14 CFR 第 1 部分中编入法典的术语是先进航空电子飞机,它指的是包含带有移动地图显示的全球定位系统 (GPS) 导航系统以及自动驾驶仪等其他系统的飞机。本章简要介绍了飞机的结构,并在大多数说明中使用飞机。轻型运动飞机 (LSA),例如重量转移控制、气球、滑翔机、动力降落伞和旋翼机都有自己的手册,其中包含有关空气动力学和控制的详细信息。
版 - 美国钢结构协会
I _ 重心线惯性矩,单位为英寸。M“”静矩,单位为英寸。截面模量,单位为英寸。r - 回转半径,单位为英寸。r _ 纤维中弯曲应力,单位为磅/平方英寸。fb .... 网的抗拉强度,单位为磅/平方英寸。E _ 强度,单位为磅/平方英寸。L _ 纤维长度,单位为英尺。I _ 纤维长度,单位为英寸。W、WI、W_由梁支撑的上压载荷,单位为磅。w ~上压载荷,单位为每单位长度或面积的磅。Wouu _ ~给定点的最大载荷,单位为磅。R、Rl _Buppo r t 点处的反作用力,单位为磅。V _垂直!!.1 磅。M、~h、M_给定点处的弯曲力矩,单位为英寸磅。

模块化铁鸟的建模与控制 - STM 存储库
摘要:本文介绍了模块化铁鸟新概念的控制架构和控制规律,旨在重现飞行载荷,以测试中小型飞机和无人机的移动式气动控制面执行器。铁鸟控制系统必须保证反作用力的驱动。一方面,液压执行器模拟飞行过程中由于气动和惯性效应而作用于移动表面的铰链力矩;另一方面,待测试的执行器施加主动铰链力矩来控制同一表面的角位置。参考气动和惯性载荷由飞行模拟模块生成,以重现操作过程中出现的更真实的情况。控制动作的设计基于用于产生载荷的液压装置的动态模型。该系统使用比例积分微分控制算法进行控制,该算法通过优化算法进行调整,同时考虑了被测执行器的闭环动力学、受控装置的不确定性和干扰。通过数值模拟证明了所提出的架构和控制规律的有效性。

双横臂悬架上控制臂材料优化
将总重量减轻 10-12%。 通过材料比较优化上控制臂。 降低零部件成本并提高车辆性能。 3. 力的计算 A. 静态条件 地球引力 W=mg 通过重心作用。它作用于轮胎和道路之间的接触面。为假设作用于车辆的边界条件,考虑了 SUV 的上控制臂。该 SUV 来自 TATA Motors,型号为 Safari。令 R 1 为前轴重量,R 2 为后轴重量。重量必须分为前轴重量和后轴重量。前轴占总重量的 52%,后轴占总重量的 48%。车辆总重量 = 2650 kg = 25987.6 N 因此,前轴重量 = 1378 kg = 13513.5 N 一个车轮的反作用力 = 1378/2 = 689 kg = 6756.8 N 因此,后轴重量 = 1272 kg = 12474.05 N

静电驱动 MEMS 悬臂梁建模
顾名思义,悬臂梁 MEMS 开关是一种由机械位移控制的电开关。它由两个主要部分组成:底座和悬臂梁(图 1)[1]。悬臂梁由导电材料制成(或其一部分,取决于设计),通常是铝。底座上沉积有一层导电材料层。在设备的这两个导电部分之间施加电压后,形成一个有限平行板电容器 [2, 3],由于电容器板之间的静电吸引力 [4, 5],悬臂梁开始向底座弯曲。悬臂梁以弹性反作用力 [6] 作出反应,并在两个力抵消的位置停止。在某个电压(驱动电压)[7–10] 下,力之间的平衡变得不稳定,悬臂梁在底座上坍塌 [11],从而建立电容器板之间的接触并闭合电路。在该模型中,认为下电极上没有沉积介电层(因此极化电荷可以忽略不计 [12])。新的理论模型考虑了有限平行板电容器中的边缘效应。将理论上获得的驱动电压与计算机模拟的 MEMS 设备驱动电压进行了比较。
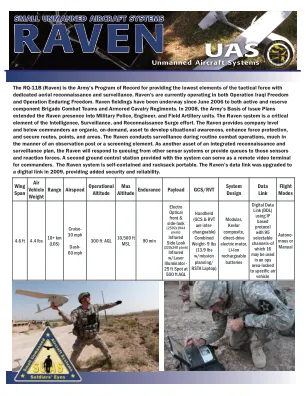
小型无人机系统
RQ-11B(渡鸦)是美国陆军的一项计划,旨在为战术部队的最低级别部队提供专用的空中侦察和监视。渡鸦目前在伊拉克自由行动和持久自由行动中服役。渡鸦自 2006 年 6 月起开始在现役和预备役旅战斗队和装甲骑兵团服役。2008 年,美国陆军的《基本发行计划》将渡鸦的部署扩展到了宪兵、工兵和野战炮兵部队。渡鸦系统是情报、监视和侦察增援行动的重要组成部分。渡鸦为连级及以下指挥官提供了一种有机的、按需的资产,以发展态势感知、加强部队保护以及保护路线、点和区域。渡鸦在常规作战行动中进行监视,其方式与观察哨或筛选部队非常相似。作为综合侦察和监视计划的另一项资产,Raven 将响应来自其他传感器系统的排队或为这些传感器和反作用力提供排队。系统提供的第二个地面控制站可作为指挥官的远程视频终端。Raven 系统是独立的,可放在背包中携带。Raven 的数据链路于 2009 年升级为数字链路,提高了安全性和可靠性。