XiaoMi-AI文件搜索系统
World File Search System发生故障
视觉集成导航系统,用于在 GNSS/SBAS 或 ILS 发生故障时进行飞机最后进近
本文提出了一种视觉集成导航系统,用于引导飞机在最终下滑道上滑行。该系统利用机载视觉系统跟踪跑道特征并估计飞机相对于着陆跑道的 6D 姿态。如果 ILS 或 GNSS/SBAS 传感器性能下降或出现故障,所提出的视觉集成导航系统将允许飞机继续执行最终进近程序,并保持导航精度。为了处理由于图像处理时间而导致的此类基于视觉的测量不可忽略的延迟,建立了一个包含时间延迟测量的误差状态卡尔曼滤波器 (ESKF) 框架。所提出的延迟测量 ESKF 框架利用了这样一个事实:摄像机图像采集由系统触发,因此可以无延迟地通知。这使得导航滤波器能够及时向前执行估计状态的反向传播,以便在测量可用时为未来的校正步骤做好准备。基于此框架的视觉集成导航系统已开发出来,并在模拟中验证了其功能。其估计性能将通过固定翼无人机实验平台上的两种不同视觉系统进行飞行评估。

PSK-50E-DIN 系列数据表
CUI 产品未获授权或保证用作需要极高可靠性的设备中的关键组件。关键组件是指生命支持设备或系统中的任何组件,如果其发生故障,可以合理地预期会导致生命支持设备或系统发生故障,或影响其安全性或有效性。

KAERI/TR-665/96:安全系统 RCM 实施指南
维护良好的系统发生故障的频率会降低。发生故障的频率降低意味着可靠性和工厂可用性的提高。故障不仅是可靠性的衡量标准。频繁停止使用系统进行预防性维护不会使其比经常发生故障的系统更可靠。RCM 可以通过设置维护来纠正频繁的故障,从而降低组件故障的发生率,从而提高可靠性。在后一种情况下,RCM 可以通过消除不必要的预防性维护和检查来减少维护引起的不可用或维护停机时间。此外,RCM 还提高了设备可用性,因为它强调使用性能监控和诊断技术来代替更具侵入性的维护方法。
半导体可靠性手册 |瑞萨
7. 尽管瑞萨电子致力于提高瑞萨电子产品的质量和可靠性,但半导体产品具有以一定比率发生故障和在特定使用条件下发生故障等特定特性。此外,瑞萨电子产品不采用抗辐射设计。请确保实施安全措施,以防止瑞萨电子产品发生故障或故障时造成人身伤害、火灾造成的伤害或损害以及社会损害,例如硬件和软件的安全设计(包括但不限于冗余、火灾控制和故障预防)、老化退化的适当处理或任何其他由您自行负责的适当措施,作为对您产品/系统的保修。由于单独评估微机软件非常困难且不切实际,请评估您制造的最终产品或系统的安全性。

计算机:一台神奇的机器
单个中央设备,称为集线器。集线器可以是计算机集线器,有时也可以是交换机。集线器控制此网络的功能。任何需要从一台计算机传输到另一台计算机的信息都必须通过中央集线器。这种类型的网络很容易设置,但如果中央连接点发生故障,整个网络就会停止工作。但是,当电缆发生故障时,只有一台计算机会受到影响,而不会影响整个网络。
个人飞行器经验教训
• 设计了 5 个冗余电动机系统 – 一体式电动机和变速箱,可在 500 rpm 时实现 30 hp – 已证实无齿轮减速的环形电动机在此功率水平下不可行(太重/功率太大,直径对于所需的 rpm 而言太大)。 – 带皮带传动的 36 极电动机重 28.6 lbs,效率为 92%,最多可在 4 极和/或一半皮带发生故障时仍能产生全部功率。第 5 极发生故障时,可在热失控前 2 分钟内保持额定功率。 – 带行星齿轮的四电机重 58.0 lbs,效率为 92%,可在 1 台电动机和/或单齿轮行星齿轮发生故障时仍能产生全部功率。另一台电动机发生故障时,可在热失控前 2 分钟内保持额定功率。 • 满足 FAA 多引擎可靠性的分析 - 利用海军可靠性工具集进行故障树分析,包括逐个组件构建以捕获零件数量、复杂性和特定组件的故障率。 - 前 500 小时内的可靠性为 99.8%(在此期间无需检查或更换),成功概率(2 分钟紧急期间没有后续严重故障)为 99.99997。
系统 5-B - EUCON 产品指南
和 DSP 核心具有双冗余电源。DSP 核心包括冗余功能,在发生故障时可自动切换。系统计算机具有内置 RAID 系统。系统还包括广泛的诊断功能,可警告操作员任何故障。例如,即使 CM401 表面模块或系统计算机发生故障,音频仍可传输,操作员仍可控制音频。处理是分布式的,因此具有很强的故障恢复能力。

07-11-23 RZ Hybrid 6-Seiter.indd - 英飞凌科技
组件只能在获得英飞凌科技的明确书面批准的情况下才能用于生命支持设备或系统,前提是可以合理地预期此类组件的故障会导致该生命支持设备或系统发生故障,或影响该设备或系统的安全性或有效性。生命支持设备或系统旨在植入人体或用于支持和/或维持和维持和/或保护人类生命。如果它们发生故障,可以合理地假设用户或其他人的健康可能受到危害。

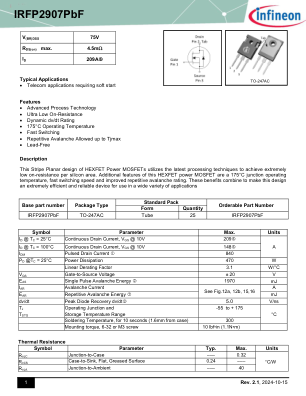
IRFP2907PbF
本数据表中描述的英飞凌科技组件仅在获得英飞凌科技的明确书面批准的情况下才可用于生命支持设备或系统和/或汽车、航空航天应用或系统,前提是可以合理地预期此类组件的故障会导致该生命支持、汽车、航空航天设备或系统发生故障,或影响该设备或系统的安全性或有效性。生命支持设备或系统旨在植入人体或用于支持和/或维持和维持和/或保护人类生命。如果它们发生故障,可以合理地假设用户或其他人的健康可能受到危害。